| CNC sur base du projet Américain Shapeoko V.1 |
Et oui... j'ai eu envie de mettre un pied dans l'aventure des CNC qui signifie pour les uns "Computer Numerical Control" et pour d'autres "Commande Numérique par Calculateur"...
Il s'agit en fait d'une machine dotée d'un porte outil supportant soit une fraiseuse, soit une extrudeuse pour la transformer en imprimante 3D.
Ce porte outil se déplace dans les 3 axes X-Y-Z avec une extrême précision grâce à des moteurs "pas à pas".
Mon choix s'est porté sur la première version de la machine Américaine SHAPEOKO.
Elle a subi diverses transformations "maison" qui ont été reprises aujourd'hui sur la version.2 du fabricant Américain !
Les adaptations principales sont les suivantes:
1) Ajout d'un deuxième moteur pour l'axe Y
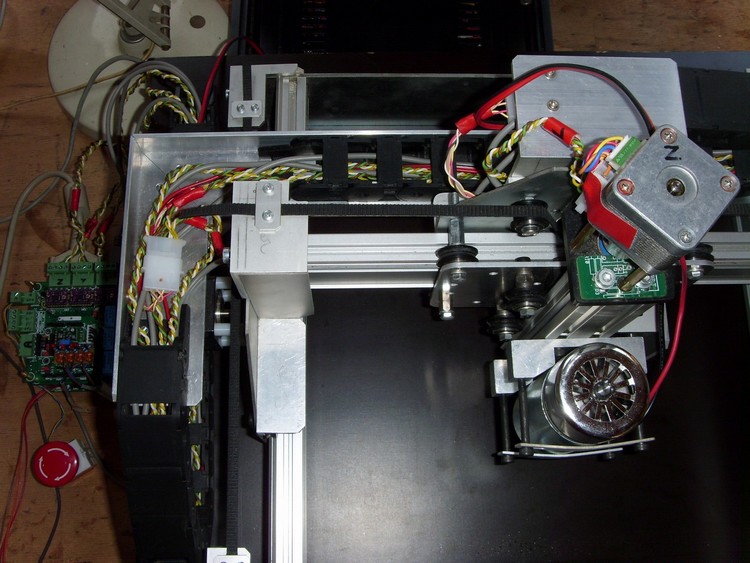
2) Placement des moteurs Y en extérieur du bâti pour agrandir un peu la zone de travail
3) Rigidification de l'axe X par pose d'un chemin de câble posé sur deux consoles solidaires des 2 chariots latéraux
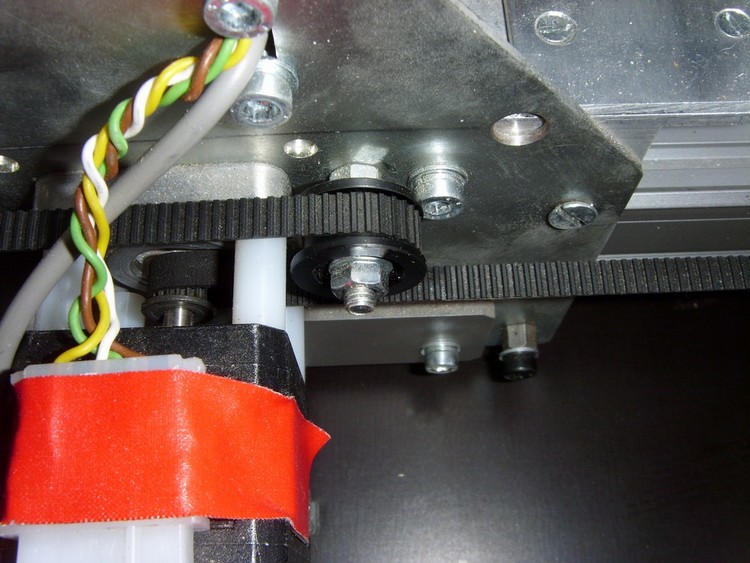
4) Modification du chemin de la courroie de l'axe X pour lui assurer une meilleure prise sans risque de "dérapage" induisant des pertes de pas.
5) Pose de deux chaînes articulées, passe-cable, en X et en Y
6) Modification de la tête Z (Tête de roulement, ajout d'un pilier, ...)
7) Les fins de courses sont des capteurs à effet Hall
8) Les modules de gestion électroniques ont été conçus, réalisés et mis au point au sein d'une petite équipe de passionnés.
L'interface PC, le contrôleur de la fraiseuse (Spindle), les relais auxiliaires et les drivers moteurs XYZ ont finalement été remplacés par des modules chinois fiables et défiant toute concurrence... 
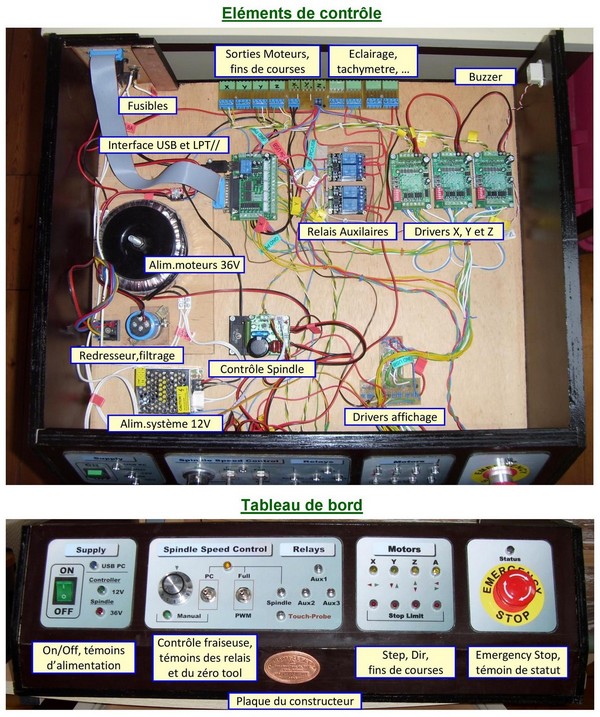

La machine est posée sur un support qui renfermera l'alimentation et les drivers de commande.
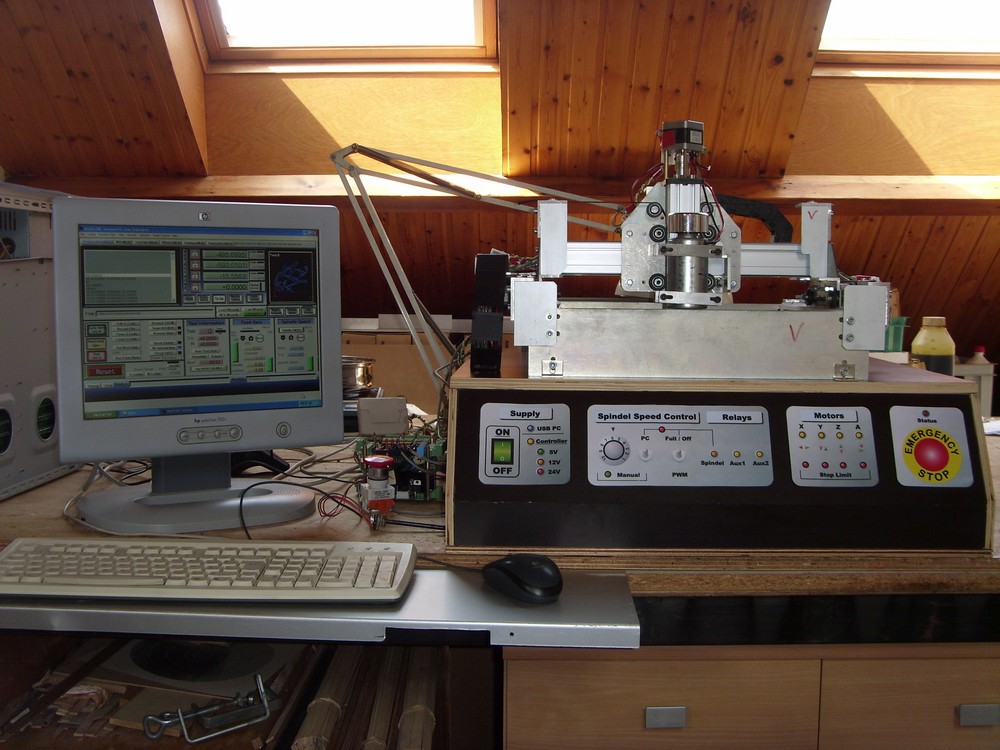
Le pilotage de la machine est assuré par le logiciel MACH3, par une connexion au port parallèle de votre PC.
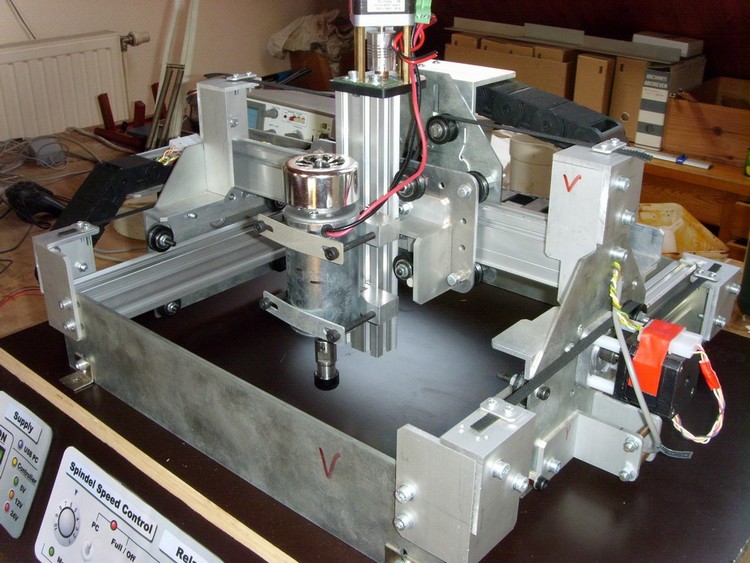
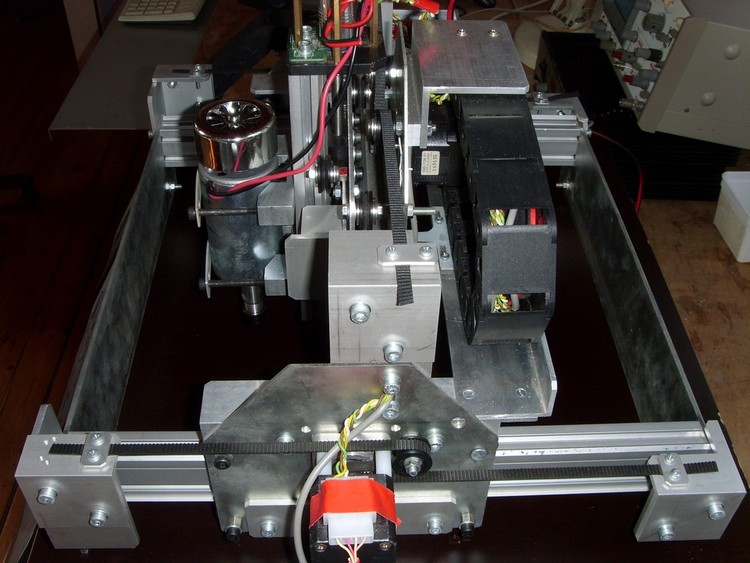
Vue sur les dispositifs permettant de placer les moteurs et les courroies en extérieur du bâti Vue plongeante, de profil. Moteur ajouté sur l'axe Y
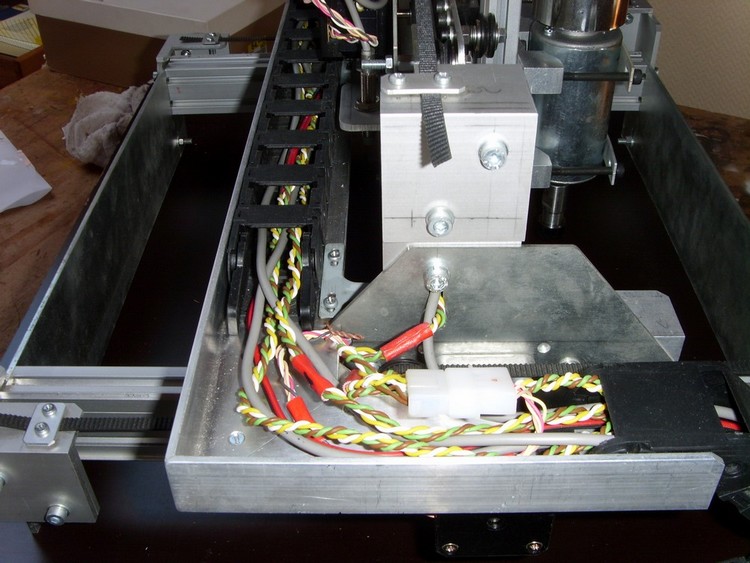
Chemin de câble et jonction avec les chaînes passe-câbles Vue du haut de l'ensemble

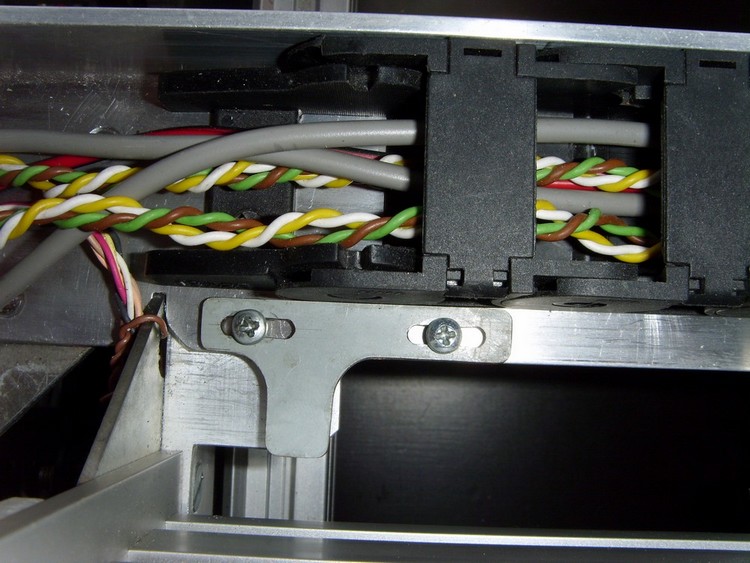
Console de support du chemin de câble. On voit, en dessous, le nez du capteur magnétique de fin de course Y Une des deux butées réglables pour le capteur magnétique de l'axe X
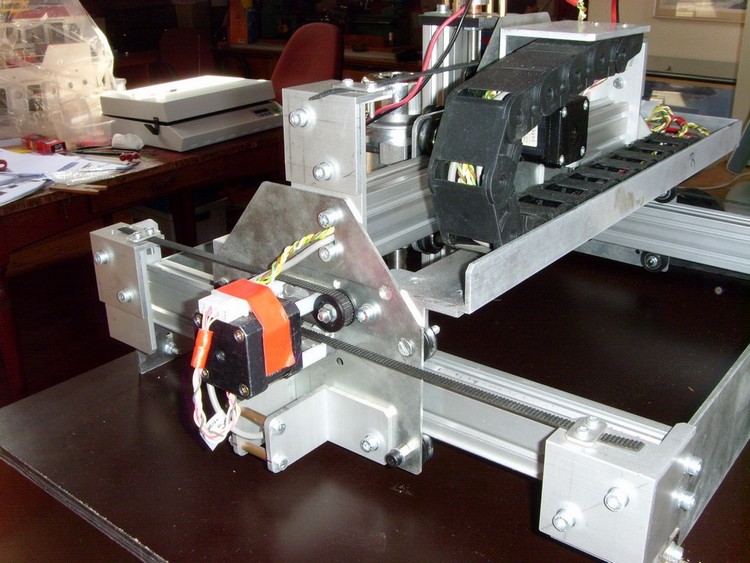
Placement des moteurs Y en extérieur du bâti. Placé sous le moteur et protégé par deux équerres se trouve le capteur de fin de course Y

Axe Z portant une fraiseuse Alimentation + Isolation PC + 4 Drivers de puissance des moteurs
Un module Arduino peut encore y être ajouté.

Trafic Visiteurs: