| ||||||
 | ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
|
| ||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| [ Accueil ] [ CONTACT ] [ PLAN du Site ] [ RCNV ] [ Publications ] [ Chantiers Bateaux ] [ Technique Modélisme ] [ Electronique ] [ Radios Vintage ] [ Multi-Switch ] [ Vrac ] [ Astuces ] [ Liens ] [ Base ] [ Compteur ] | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
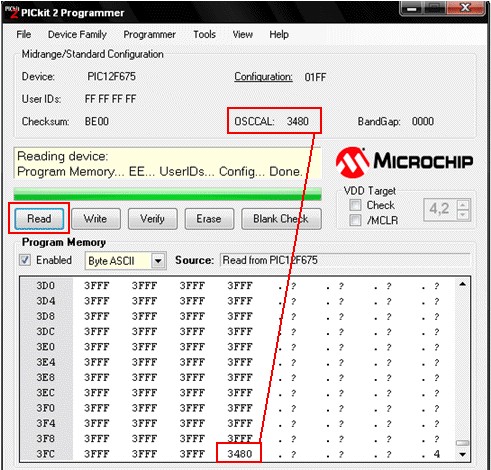
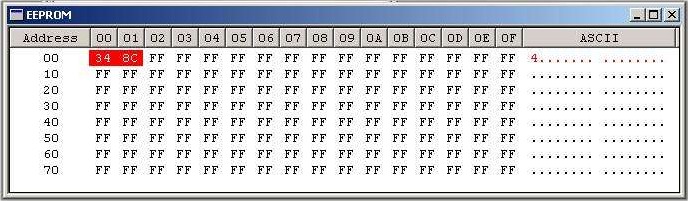
Adresse 3FF , Data type: 34xx
Par exemple 347C, 34 étant la commande RETLW et 7C la valeur variant de 0 à FC (64 valeurs précises).
La valeur d'étalonnage se trouve à la dernière adresse de la zone de mémoire du programme utilisateur, à l'adresse 0x.3FF.
Il se présente sous la forme d'une instruction RETLW et le code utilisateur doit inclure une instruction CALL 0x3FF qui retournera avec le paramètre d'étalonnage dans le registre W. Il sera ensuite écrit dans le registre OSCCAL.
La fréquence de l'oscillateur interne du PIC varie avec les changements de température et de tension d'alimentation. Lorsque la tension d'alimentation augmente, la fréquence diminue légèrement. Pour des applications ne nécessitant pas de précision "horaire" il n'est pas nécessaire de se soucier de la valeur placée en adresse 0x.3FF.
A défaut une valeur moyenne 0x.80 (h.80, $80, =d.128) pourra être programmée à l'adresse 0x.3FF lorsqu'elle aura été éventuellement perdue lors d'une programmation antérieure.
Certaines commandes Stamp-Basic ne sont pas reconnues par le PicBasic Pro Compiler et il faudra les adapter. Dautres devront parfois être ajoutées. A noter que le code à écrire dans le compilateur PBP peut l'être en "pur" Basic et non en "language Basic Stamp". En fait, il y a très peu de différence: (déclaration des variables et des i/o, ports, ...)
Je ne peux que vous inviter à consulter le manuel détaillé du compilateur que vous utilisez et le data sheet du Pic utilisé.
INCLUDE <"File.ext">
La commande INCLUDE permet dinclure dans le programme divers fichiers sources écrits en Basic. Il est ainsi possible de disposer séparément dune bibliothèque de subroutines standardisées, de définitions quelconques, de procédures personnelles,
qui pourront facilement être placées dans nos programmes sans devoir les réécrire à chaque fois complètement. «Modedefs.bas», par exemple, sera inclus lorsquon utilisera des commandes gérant les liaisons Séries, Ps4_2k.bas est utile pour le 16F628,
Dans notre cas, et avant toute chose, il faut spécifier à PBP que le programme à compiler a été écrit pour un Stamp dont on aura certainement utilisé un ou lautre de ses noms de registres particuliers. On indiquera donc en début de programme linstruction INCLUDE «Bs2defs.bas». A noter quil sera parfois nécessaire de mettre en remarque, les lignes inutiles de ces sous-programmes. En effet, toutes leurs lignes actives seront écrites dans le Pic, au risque de surpasser la place absolument nécessaire aux lignes du code principal ! Dans ce cas, le programme, trop grand, ne pourrait pas être placé dans le Pic ... Si on lit l'incontournable fichier Bs2defs.bas, on se rend vite compte que la plupart de ses lignes peuvent souvent être mises en remarque pour les désactiver. Il s'agit notamment des définitions des noms de variables systèmes propres au Stamp, pour autant, bien sûr, que ces variables n'aient pas été utilisées dans le programme. En utilisant PBP pour Windows, vous disposez au dessus de lécran dune fenêtre permettant de choisir le Pic que vous utiliserez. Par défaut, cest généralement le Pic 16F84 qui est présélectionné. Le choix opéré dans cette fenêtre écrira automatiquement léquivalent de linstruction INCLUDE <Pic utilisé> dans le fichier .asm. Il ne faut donc jamais écrire, par exemple, INCLUDE «12F629.bas» dans le programme PBP. Il en résulterait, de toute façon, un message derreur. @ <language Assembleur>
Lindicatif @ placé en début de ligne permet linsertion dune commande «assembleur» dans votre programme PBP. Une commande des plus pratiques est la définition des paramètres programmables de votre Pic et notamment le fameux «Master Clear» quil faut désactiver si on veut utiliser cette entrée comme une entrée normale.
Exemple d'un début de programme pour le compilateur PicBasic Pro - Ver. 2.46 : . ' Pic Specifications '-------------------------- @ Device Pic12F629, intrc_osc, wdt_off, pwrt_on, mclr_off, protect_off Paramètres programmables du Pic Include "BS2DEFS.bas" Stamp to pic Define OSC 4 Alignement sur 4Mhz des commandes dépendant du temps CMCON=7 Analog comparators off OSCCAL=120 Default: Center=128 Ajustage de loscillateur interne (utiliser le paramètre précis d'usine à lire à l'adresse 3FF )
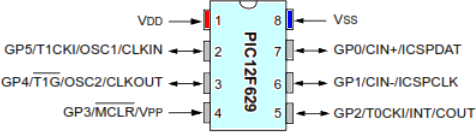
Dans ce cas, on précise que pour le Pic 12F629 utilisé, on a choisi dutiliser son oscillateur interne, que le Watch Dog Timer est désactivé, que le Master_Clear (In GP3) est désactivé,
Dans cet exemple, où un pic 12F629 a été choisi, cette commande modifie les paramètres du programmateur placés par défaut dans le fichier INC\M12F629.inc que je vous invite à aller lire. En effet, par défaut, il faut savoir que le Master_Clear du 12F629, par exemple, est activé; ce qui provoquera des surprises lorsque sa broche GP3 est utilisée comme une entrée normale ! Variables
Seules sont reconnues les définitions suivantes : Bit, Byte et Word. Le Nibble nest pas autorisé, il faudra le redéfinir en Byte. Assignation des pinsComme nous lavons dit plus haut, pour assurer une certaine concordance entre les noms des registres ou des Pins du Stamp et des Pic, le fichier BS2DEFS.bas doit être inclus dans le haut du programme à compiler. Notez que malgré cette précaution, les variables DirS, DirH, DirL et Dir0-Dir15 ne peuvent pas être utilisées avec le Compilateur PicBasic Pro. Il faut utiliser les variables TRIS en notant toutefois que leur état est opposé à celui des variables Dirs du Stamp ! Ainsi Dir0 = 1 ne sera pas reconnu si on désire placer la pin PORTB.0 en Direction « Sortie ». Il faudra écrire : TRISB.0 = 0 et la pin PORTB.0 sera placée en état de Sortie. Vous pouvez cependant toujours utiliser une commande qui définit automatiquement la Direction (Exemple : Pulsout = Sortie, RCTime = Sortie, Pulsin = Entrée, Output 0, Input 1,
).
De même OUTA devra être réécrit PORTA. Enfin, il est toujours possible de préciser distinctement la direction voulue avec les commandes Input et Output. Exemple : ' In/Out Assignation for 12F629 '-------------------------------------------- ' Gnd pin 8. Gnd Output 0 pin 7. Out0 Output 1 pin 6. Out1 Output 2 pin 5. Out2 Input 3 pin 4. In3 Output 4 pin 3. Out4 Output 5 pin 2. Out5 ' +Vcc pin 1. Vcc Choix du Quartz
PBP génère donc des programmes prévus, par défaut, pour tourner avec un PIC cadencé à 4Mhz. Les instructions sensibles au temps prennent une durée de traitement de 1 msec. Linstruction Pause 1000 génère ainsi une attente de 1 seconde. Pourtant, bien que le programme fonctionne bien, il sera parfois nécessaire de faire tourner le microcontrôleur plus vite. Il sera peut être aussi indispensable de disposer dEntrées/Sorties Série à 19.200 bauds au lieu des 9600 bauds obtenus avec un oscillateur de 4 Mhz. Les Pic programmés avec PBP peuvent donc tourner à plus de 4Mhz de deux façons : 1) Utiliser un quartz externe de plus de 4Mhz et ne rien spécifier à PBP ! Dans ce cas, il faut seulement tenir compte du temps, plus court, nécessaire au traitement des instructions. Si vous désirez une liaison série à 19.200 bds, il suffit dun oscillateur à 8Mhz. A noter cependant que toutes les instructions de votre programme, y compris les instructions Serin/Serout, seront affectées de cette élévation de vitesse. Si vous avez écrit de faire tourner les commandes Serin/Serout à 9600 bds, le doublement de la vitesse du quartz donnera, en fait, une vitesse de 19.200 bds. Retenez également que la vitesse de traitement des commandes Pause et Sound sera modifiée aussi ! 2) La deuxième méthode est aussi dutiliser un oscillateur plus rapide mais en le spécifiant à PBP. Cette information se réalise grâce à la commande DEFINE. Par exemple : DEFINE OSC 8 si on utilise un oscillateur à 8 Mhz. Grâce à cette information, placée en début de programme, les commandes dépendant du temps seront exécutées sur base dun quartz à 4 Mhz tandis que toutes les autres seront traitées à la fréquence du quartz. Si on utilise un quartz de 16Mhz il faudra écrire en début de programme, DEFINE OSC 16 pour que la valeur de la pause, par exemple, reste égale à celle donnée pour un quartz, de 4Mhz. Utiliser la commande DEFINE OSCxx permet donc de compenser et de produire le timing correct, sur base de calcul d'un oscillateur à 4Mhz, pour les commandes PBP suivantes: COUNT, DEBUG, DEBUGIN, DTMFOUT, FREQUOUT, HPWM, HSERIN, HSEROUT, I2CREAD, I2CWRITE, LCDOUT, OWIN, OWOUT, PAUSE, PAUEUS, SERIN, SERIN2, SEROUT, SEROUT2, SHIFTIN, SHIFTOUT, SOUND, XIN et XOUT. Attention, la commande DEFINE OSC
na cependant pas deffet sur les commandes PULSIN, PULSOUT et RCTIME ! La valeur du quartz, pour ces trois dernières commandes, influencera donc directement leur résolution. A 4 Mhz ces commandes opéreront avec une résolution de 10 µsec ; à 20Mhz, la résolution sera 5 fois plus fine, soit 2 µsec. Enfin, retenez que si vous avez choisi dutiliser un quartz supérieur à 4 Mhz, il faudra cocher loption Oscillateur = HS (High Speed) et non plus loption XT du programmateur (EpicWin Programmer).
Vitesse dexécution d'un programme
Le problème potentiel le plus important dans lexécution dun programme est
le temps. Outre les instructions relatives à la lecture de lEEprom, la plupart des instructions, telles que Goto et Gosub, sexécutent des centaines de fois plus vite quavec le Stamp ! Bien que, dans la plupart des cas, ce soit particulièrement bénéfique, les programmes dont le timing a été développé empiriquement pourront poser des problèmes. La solution est simple: les bons programmes ne font pas appel à des boucles dattente de type For
Next pour en ralentir ou synchroniser le déroulement. Dans la mesure du possible, on fera appel à des méthodes de synchronisation sur des événements extérieurs (saisie clavier, modification détat dune entrée,
) ou toute autre méthode de synchronisation non temporelle. Si des délais dattente sont nécessaires, on utilisera de préférence les commandes spécifiques telles que Pause, Pauseus, Nap ou Sleep. Coefficient d'adaptation
Nous avions déjà évoqué la question des valeurs à traiter, données par des instructions utilisant des unités de temps et qui dépendent de la vitesse de travail du processeur. La solution proposée était de recalculer les seuils à tester en fonction de la vitesse de loscillateur utilisé et de replacer ces nouvelles valeurs compensées dans le programme à destination de PBP. Un coefficient dadaptation sûr avait donc été défini pour les vitesses fréquemment utilisées (StampIIsx-50Mhz, Pic 20Mhz, 10Mhz, 16Mhz, 8Mhz et 4Mhz). Nous venons de voir que la commande DEFINE OSC <Speed> de PBP apporte une relative souplesse mais quelle nest pas active pour toutes les commandes utilisant les unités de temps ! Ainsi, la commande DEFINE OSC nagissant pas sur les commandes telles que PULSIN, PULSOUT, RCTIME, leur résolution dépendra directement de loscillateur du Pic. Exemple: Valeurs mesurées de Pulsin pour une même impulsion.
Pour ces trois commandes, il sera donc toujours nécessaire dutiliser le coefficient dadaptation « Stamp vers Pic » en tenant compte de loscillateur utilisé avec le Pic. Pour rappel :
Le résultat est une valeur entière. Les décimales sont ignorées. PIC 40Mhz 80/100 PIC 20Mhz 40/100 PIC 16Mhz 32/100 PIC 8Mhz 16/100 PIC 4Mhz 8/100 For
Next
Il y a lieu de toujours définir le pas. Exemple: For i =10 to 1 Step -1
Next i Ou encore FOR B2 = 20 TO 10 STEP -2 Count from 20 to 10 by 2 Serout 0,N2400,[#B2, ] Send each number to Pin0 serially NEXT B2 Go back to and do next count Serout 0,N2400,[10] Send a linefeed Comme nous lavons dit plus haut, il faudra éviter dutiliser cette commande pour réaliser des boucles dattente en vue dassurer la synchronisation du programme. If
Then
Avec les anciens éditeurs Stamp, on ne pouvait seulement spécifier qu'une étiquette après un IF
Then. Il n'était donc pas possible d'écrire, à la suite de l'énoncé conditionnel, la série d'instructions répondant à la condition. En outre, l'option "Else" n'était jamais écrite expressément car ses instructions étaient, paradoxalement, traitées directement à la ligne suivante de l'énoncé conditionnel ! Il s'agissait alors d'une procédure lourde de traitement inverse au langage Basic traditionnel. Ce problème a été résolu à partir de la version 2.5 de cet éditeur. Heureusement, PBP permet maintenant lécriture dune boucle complète de type If..Then..Else..Endif, plus proche du langage Basic et du programme structuré. Cela évite cette fastidieuse opération, rencontrée précédemment avec le Stamp, consistant à inverser le test logique pour conserver une lecture conforme au programme structuré. (Ecriture en « condition inverse » du Stamp avec les anciennes versions d'Editeurs) Initialisation des variables et registres
Le Stamp place automatiquement toutes les variables et les registres à zéro lorsquun programme démarre ou lorsquil se Reset. Ce nest pas le cas avec un Pic programmé avec PBP.
Il est donc préférable, autant que nécessaire, de définir exactement chaque variable en début de programme. Il existe bien la commande CLEAR , à placer en début de programme, après la définition des variables et qui est sensée remettre à zéro toutes les variables de la RAM. Celle-ci ne me semble cependant pas toujours efficace En général, les variables seront donc initialisées au début du programme en précisant expressément leur valeur de départ, plutôt que dutiliser la commande CLEAR. Exemple : Init : High LED1 Niveau = 178 Celsius = 36 Debut : <Programme>
Goto Debut MAX et MIN
Les opérateurs MIN et MAX ne fonctionnent pas exactement comme avec le Stamp. MAX retourne ici le maximum de deux valeurs, MIN retourne le minimum de deux valeurs. Cela sapparente donc aux langages Basic communs sans connaître les problèmes de limite, de 0 et 65535, rencontrés avec les instructions Min et Max du Stamp. Dans la plupart des cas, il faudra simplement changer MIN en MAX et MAX en MIN dans le programme Stamp pour que tout fonctionne correctement avec PBP ! READ & WRITE
Certains Pic disposent dune mémoire non volatile de type Eeprom à accès I2C. Cest notamment le cas pour les 12CE51x, 12CE67x et 16CE62x. Les instructions Read et Write ne fonctionneront donc pas pour ces composants ! Il faut simplement les modifier par I2CREAD et I2CWRITE. Goto et Gosub
Essayez de ne jamais employer la commande Goto dans vos programmes, sauf celle placée à la fin du corps principal du programme permettant le bouclage permanent du programme structuré en remontant à sa première ligne (assimilable à la commande structurée Do While
Enddo). Bien que cette commande soit un mal, parfois nécessaire, il faut absolument minimiser son utilisation. La bonne manière décrire un programme est de le structurer en blocs logiques, en procédures spécifiques de traitement pour faire sauter le programme de lune à lautre. Linstruction Gosub permettra ce passage dun bloc de traitement à un autre. Lavantage de cette méthode est que chaque sous-routine constitue un ensemble homogène, disposant dune entrée (étiquette nominative) et dune instruction de sortie assurant sa fermeture (Return). Rien nempêche dailleurs, au cur dune sous-routine, de faire appel à une autre sous-routine. Les instructions de sortie de chacune delles (Return) assureront toujours la fermeture de chaque sous-routine avant de revenir au corps du programme principal, là où on l'avait quitté. Ainsi, il ny aura jamais de risque de dépasser les limites de la «pile opérationnelle» du processeur, surchargé par des boucles ouvertes, «oubliées» et inutiles, restant vainement en attente de traitement. Ce déplorable phénomène de surcharge, dû à des «portes restées ouvertes», se rencontre principalement dans de mauvais programmes, non structurés, où des instructions Goto ont été trop et mal utilisées. Cela conduira inévitablement au plantage inopiné du programme en cours dexécution ! Serin / Serout
Ces commandes doivent être changées en Serin2 et Serout2 LookUp / LookDown
Ces commandes doivent être changées en Lookup2 et Lookdown2
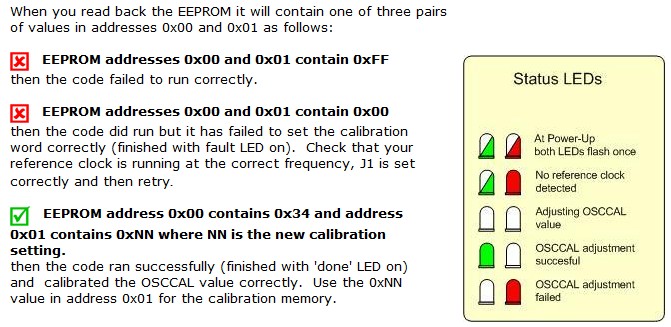
Oscillateur RC interne
De nombreux Pic, tels que les 12C671- 672, 12CE673-674, sont dotés dun oscillateur RC interne. Ces composants contiennent un facteur de calibration dans la dernière zone de lespace Code. Loscillateur interne doit être ajusté correctement en saisissant les données de cette zone pour les amener dans le registre OSCCAL. Deux instructions DEFINE ont été mises à notre disposition pour réaliser cette tâche lors de chaque démarrage du programme : DEFINE OSCCAL_1K 1 Règle OSCAL pour des composants à 1K DEFINE OSCCAL_2K 1 idem pour des composants à 2K Lune ou lautre de ces instructions, suivant le composant utilisé, doit être placée au début du programme. On peut également préciser la valeur OSCCAL (par défaut égale à 128) en lécrivant directement dans le programme après avoir testé le Pic à laide dun petit programme spécifique (voir § 12F629 et annexe) Pour les pics dotés dun oscillateur interne (12C5xx, 12CE51x, 12F6xx,
) Pic Basic Pro Compiler chargera automatiquement la valeur par défaut (128) dans le registre OSCCAL . Il est donc inutile, pour ces composants, dutiliser linstruction DEFINE si la précision de loscillateur nest pas absolument vitale.
'------------------------------------------------------------ ' PicBasic-Pro Compiler file StampIIsx to PIC 12F629 '------------------------------------------------------------ '------------------------------------------------------------ ' Test_OSCCAL.pbp (c) R.LEGAT-Avril 2005 '------------------------------------------------------------ ' Verification du calibrage de l'oscillateur interne 4Mhz du 12F629 '====================================================================== 'Lire les tops de sortie avec un oscilloscope, un BSIIsx, ... '---------------------------------------------------------------------- ' Pic Specifications '------------------------------------------------------------ @ Device Pic12F629, intrc_osc, wdt_off, pwrt_off, mclr_off, protect_off Include "BS2DEFS.bas" Define OSC 4 CMCON=7 Analog Comparators Off OSCCAL=120 'Default: Center=128 LIGNE A MODIFIER POUR CHAQUE 12F629 testé !!!
' In/Out 12F629 '------------------------- Gnd Pin8.Gnd OUTPUT 0 'Tops à lire sur Pin 7.Out0 INPUT 1 'Nc Pin6.In1 INPUT 2 'Nc Pin5.In2 INPUT 3 'Nc Pin4.In3 INPUT 4 'Nc Pin3.In4 INPUT 5 'Nc Pin2.In5 +Vcc Pin1.Vcc
'-------------------------- ' PROGRAMME '-------------------------- Debut: PULSOUT 0,100 '100 = 1msec à 4Mhz (1 msec = 1250 sur BSIIsx) 1250 x8/100 =100 Pause 5 '5 msec GOTO Debut END
Source: http://picprojects.org.uk/projects/recal/recal.htm avec fichier HEX et mode d'emploi !
---------------------------------------------------------------------------------------------------------------------------------------- Voir autre source: https://www.edaboard.com/threads/pic12f675-osccal-erased-help.212778/#5 MEMENTO PIC PROGRAMMATION . Vérifiez la liste et la syntaxe des commandes de votre compilateur BASIC! En outre ceux-ci permettent généralement d'y inclure du code ASSEMBLEUR. TRISx Sens de fonctionnement (équivalent de DIR pour les Stamp) PORTx Registre accessible en lecture et écriture (R/W)
CMCON=7 Désactive le comparateur analogique OPTION_REG Active R.PullUp par mise à 0 du bit de poids le plus fort. INTCON.INTF=0 RAZ interruption Flag INTCON=%10010000 Interrupt sur RB0/INT (16FFF877A) CLRWDT Clear WatchDog ANSEL:=0 i/o ADC en numérique
Le sujet a déjà été évoqué à la page Microcontrôleurs BASIC. Dressons un bref rappel et résumé: 1. Editeur de programme (Software): - Un simple éditeur de texte suffit mais des éditeur dédiés permettent des contrôles de language, des colorisations syntaxiques, ... 2. Compilateur/Assembleur (Software): - Pic Basic Pro Compiler. Transforme votre programme Basic en un language "machine". 3. Programmateur (Software): Il reste alors à aller placer ce fichier exécutable dans le PIC. (Programmes Free:)
4. Programmes d'environnement (Software): -Il s'agit ici d'un programme permettant le lien entre les softwares cités ci-dessus tout en restant dans la même session de travail. 5. Board Programmer (Hardware): Enfin, nous devrons disposer d'une platine matérielle sur laquelle insérer le PIC à programmer.
x
http://extremetracking.com/open?login=rglalpmn
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||



 Registre OSCCAL !
Registre OSCCAL !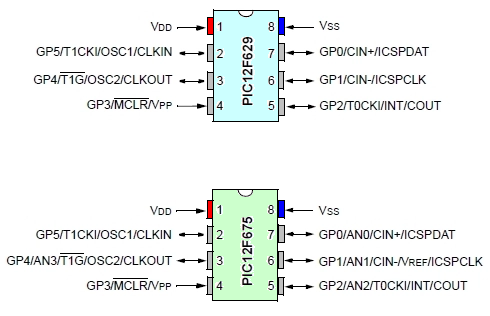





Copyright © Roger LEGAT - 2008 - Tous Droits réservés - (Thds V2)