... rgl
|
Le Génois
en Voile RC

(c) Rg. LEGAT
|
SOMMAIRE:
01 - Introduction - Présentation - Généralités
02 - Le Génois en voile RC
03 - Circuit d'écoute du Génois
04 - Modules de gestion des treuils du génois (Testeur de servo + calculateur des impulsions du testeur)
05 - Etude complète du module commercial "Double Winch GM-DW" (Schéma, platine, analyse des signaux, réalisation du module et du Programme !.)
06 - Estimation de l'espace nécessaire dans la coque
07 - Que faire si le circuit d'écoute du génois n'est pas suffisamment long, faute de place ou par manque de tours du treuil ? (DEUX treuils et poulies volantes)
08 - Variante 1 (Un SEUL treuil de débordement et servo d'ouverture à bras)
09 - Variante 2 (Débordement et réglage avec un seul treuil)
10 - Variante 3 (Longeur du circuit de débordement contournant les ridoirs)
11 - Variante 4 (Un seul treuil et poulies volantes)
12 - Etude d'un module à MicroContrôleur pour la gestion d'un simple treuil
13 - Sortie d'écoute de génois
14 - Quelques vidéos d'aménagement
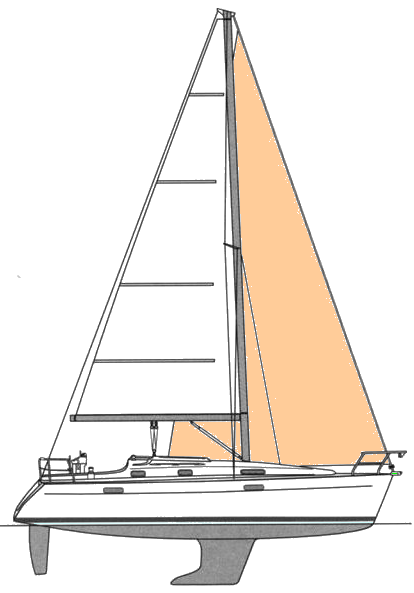
Le génois est une voile à grand recouvrement c'est à dire que, contrairement au foc, son point d'écoute se situe en arrière du mat et donc que sa partie arrière se superpose en partie avec la Grand-Voile, contrairement au foc dont la longueur de sa bordure est égale à la distance entre l'étai et le mât.
L'utilisation du génois est adaptée aux vents faibles à moyens et aux allures de près à travers.
La bordure d'un génois peut ainsi aller jusqu'à 1,5 fois celle du foc. On parle alors, dans ce cas, d'un génois à recouvrement de 150%.
Sur les voiliers des années 1970, les génois étaient à très fort recouvrement, parfois supérieur à 150%.
C'était alors une voile puissante dont la surface était très nettement supérieure à celle de la grand-voile.
À partir des années 1980, une forte tendance vers l'égalité des surfaces entre grand-voile et génois a abouti à un équilibre plus sain entre les deux voiles.
Sur un gréement en tête (étai fixé au sommet du mât), le génois est hissé jusqu'à la tête du mât.
Sur un gréement fractionné (propre généralement aux voiliers conçus pour la régate), le génois est hissé jusqu'au point de fixation de l'étai sur le mât (3/4 ou 7/8 de la hauteur).
L'utilisation du génois est adaptée aux vents faibles à moyens et aux allures de près à travers. Lorsque le vent forcit, il faut alors le remplacer par un foc puis par un tourmentin.
Aux allures portantes, on enverra à la place du génois, selon l'allure et l'équipement du bateau, un gennaker, spinnaker asymétrique ou radial.
Toutefois avec l'arrivée des enrouleurs sur les voiliers, le génois, dont la surface peut alors être réduite, se substitue également aux voiles utilisées pour le vent frais et éventuellement fort (foc et tourmentin), mais un génois enroulé partiellement sur son étai n'a plus son profil optimal et les déformations induites par l'enroulement sont une cause de vieillissement accéléré.
Il est indéniable que la ligne esthétique dun modèle de voilier équipé dun génois est attirante.
Cependant, un génois n'étant adapté que pour des allures du près aux vents de travers, et sachant que nos modèles passent rapidement par toutes sortes d'allures dont toute la gamme des vents arrières, il vous appartiendra de déterminer si la qualité ou la facilité de navigation est améliorée, par rapport à un système conventionnel utilisant, outre la GV, un foc classique mais surtout ... un seul treuil.
Il existe divers concepts permettant de gérer et de contôler un génois.
Sur cette page, nous allons nous attacher à étudier divers systèmes et circuits d'écoutes à mettre en place pour gérer correctement un génois.
Le premier système va nous demander de devoir gérer 3 treuils: 1 pour le débordement Babord/Tribord du génois, 1 pour le réglage d'ouverture du génois... et 1 pour la Grand-Voile.
Trois sorties devront donc ainsi être disponibles sur le récepteur (Débordement, Réglage génois et GV) ... sans oublier une quatrième pour le safran...
Par clarté, le circuit d'écoute de la Grand-Voile ne sera pas représenté dans les schémas.
Retenons que celui-ci pourra être constitué d'une boucle fermée ou d'un circuit ouvert avec un sandow de tension.
La commande d'ouverture du génois sera gérée par un stick distinct de l'émetteur.
Le coupler à celui de la Grand-Voile, comme c'est finalement le cas avec un foc classique, n'est peut-être pas une bonne solution car aux allures de vents arrières, le génois ne devra pas être choqué aussi largement qu'un foc qui, lui, suit généralement le même débattement que la GV puisqu'il est placé sur le même circuit d'écoutes..
Nous verrons, plus bas, le pourquoi de cette restriction.
Dans tous les cas de figure choisis, le débordement Babord / Tribord du génois sera commandé par un switch "Tout ou Rien" placé sur l'émetteur.
Nous allons donc voir en détail un système qui a fait ses preuves et qui n'est pas trop compliqué à installer, sans tomber dans l'utilisation de multiples boucles, retours et autres dispositifs de tension des écoutes.
Comme nous l'avons dit en guise de présentation de ce premier procédé, il nous faudra donc gérer deux treuils pour le génois :
- 1 treuil de "libération/débordement" qui laissera filer l'écoute du génois sur un bord ou l'autre
- 1 treuil "de bordage" pour le réglage fin de l'ouverture du génois
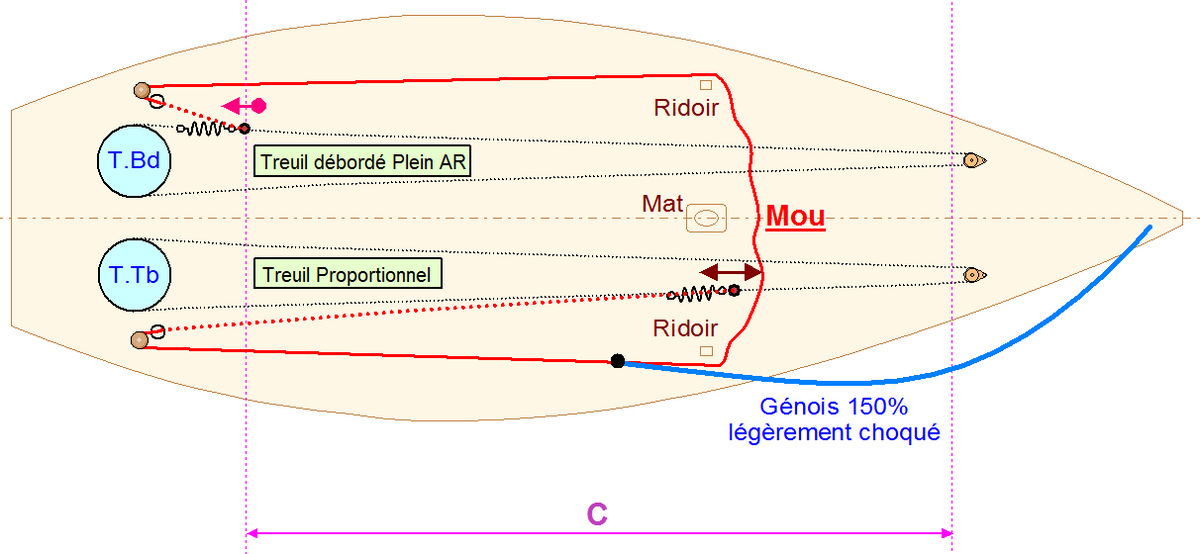
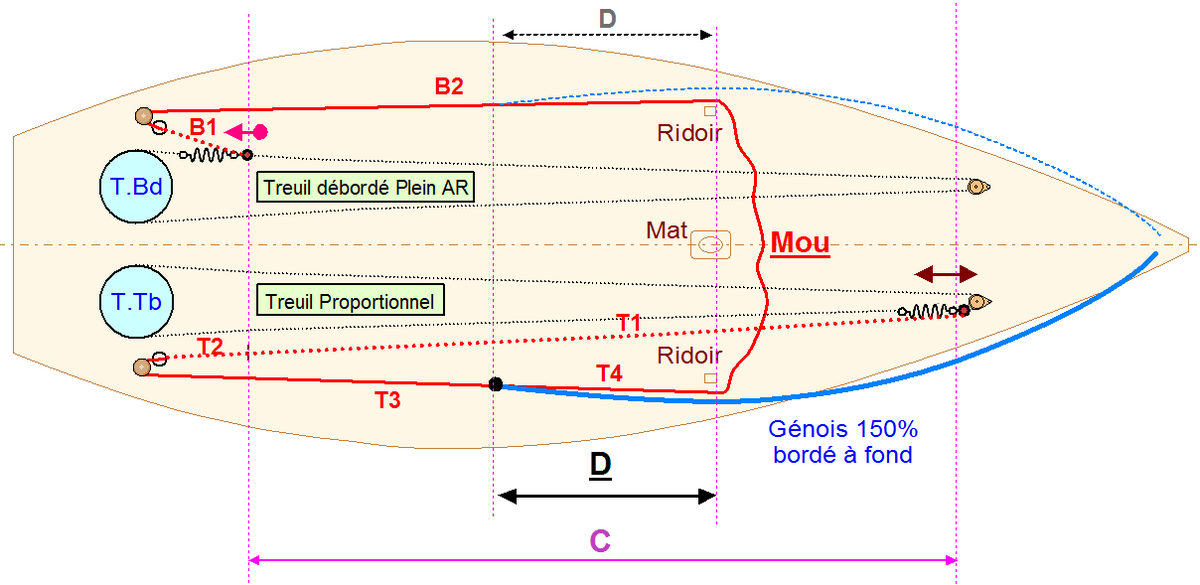
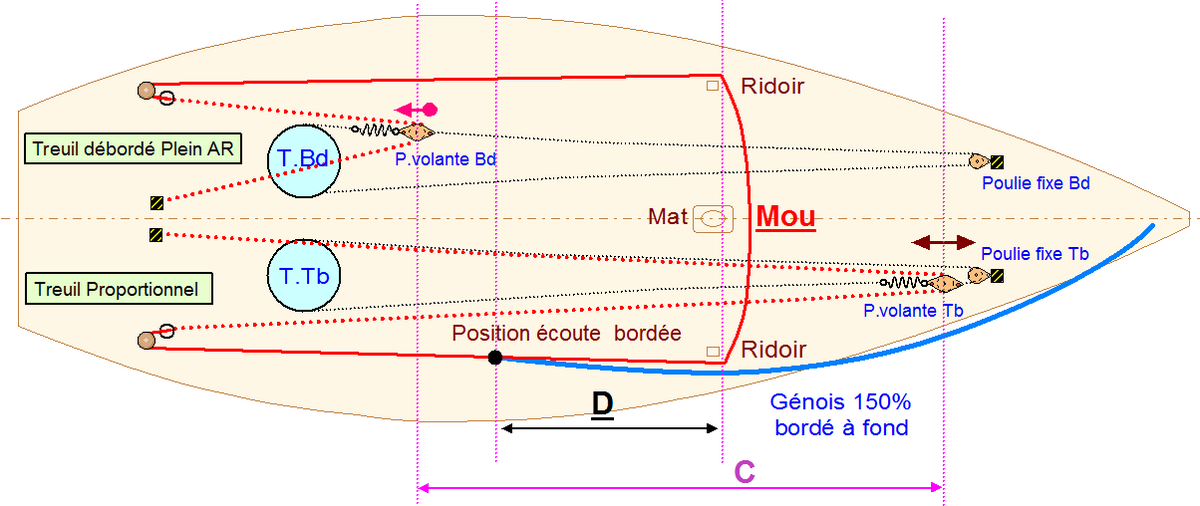
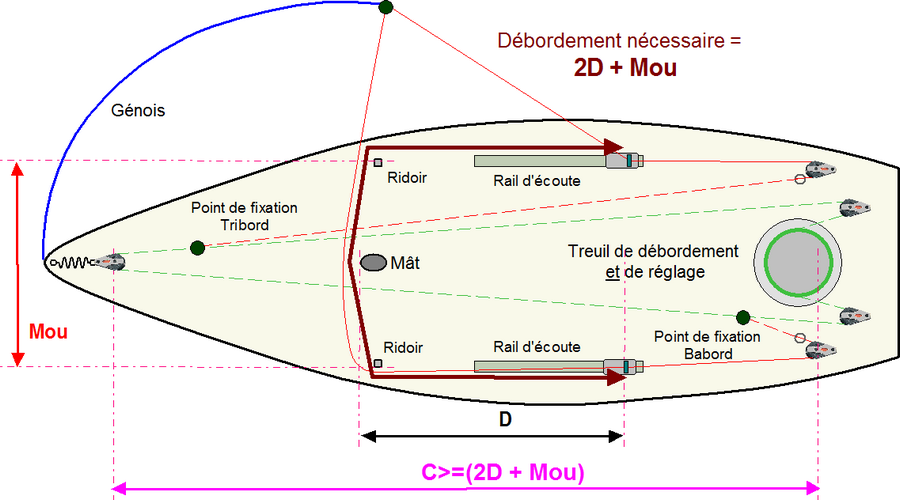
Dans le schéma de ci-dessous, le génois est établi à Tribord.
Le treuil du bord opposé (T.Bd) est complètement débordé ce qui a pour effet de libérer totalement l'écoute.
Ainsi libéré par le treuil Babord et n'étant plus retenu côté Babord, le génois passe à Tribord sous l'effet conjugué du vent et de la traction du treuil de réglage d'ouverture Tribord.
Le réglage de bordage du génois se fait finalement par ce treuil Tribord qui répond "proportionnellement" suivant la position du manche correspondant de l'émetteur.
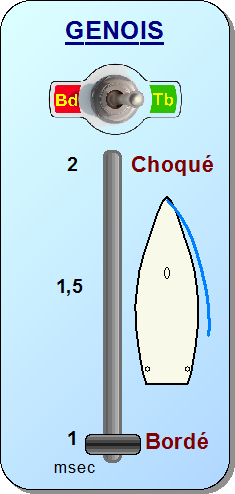
 |
Ce switch à bascule commande le système de débordement.
TB: Treuil Babord débordé à fond pour libérer la course vers Tribord
Treuil Tribord en fonction proportionnelle pour affinage du réglage
BB: Treuil Tribord débordé à fond pour libérer la course vers Babord
Treuil Babord en fonction proportionnelle pour affinage du réglage |
En basculant le switch de la voie Tout ou Rien de l'émetteur, le processus s'inversera automatiquement: le Treuil Tribord passera en position "débordé" et libèrera totalement l'écoute.
Le génois passera à Babord sous l'effet du vent et de la traction du Treuil Babord qui viendra se positionner en tenant compte de la position du manche dédié au génois.
On peut ainsi réaliser des virements de bord avec un génois bordé.
Pour faciliter ce genre de débordement, il sera bon de prévoir quelques centimètres de "rabiot" dans le circuit de débordement.
Notez ici, au passage, la grandeur C qui représente la Course disponible du circuit d'écoute.
La valeur "Mou" représente la portion du circuit de débordement comprise entre les ridoirs en y ajoutant un petit rabiot permettant plus de souplesse dans le processus de débordement.
Nous y reviendrons plus bas lors de l'estimation de l'espace nécessaire dans la coque du bateau.
Source: https://membrevoilerc.forumactif.fr/t308-genois-fonctionnel
Avec ce système, deux sorties du récepteur seront nécessaires.
- Une pour disposer du signal proportionnel qui sera appliqué au treuil contrôlant le bordage et l'ouverture du génois,
- l'autre pour l'ordre "Tout ou Rien" déterminant le débordement à Babord ou à Tribord.
Pour rappel, un autre manche sur l'émetteur et une autre sortie récepteur devront rester libres pour le treuil de Grand-Voile.
Et évidemment aussi une dernière 4ème voie pour le contrôle du safran.
Concept 01
 |
Kit platine testeur de servo.
Ici un module commercialisé par Conrad
utilisant un simple CD4001 (Quad NOR)
Il en existe d'autres sur base du Double Timer NE556 |
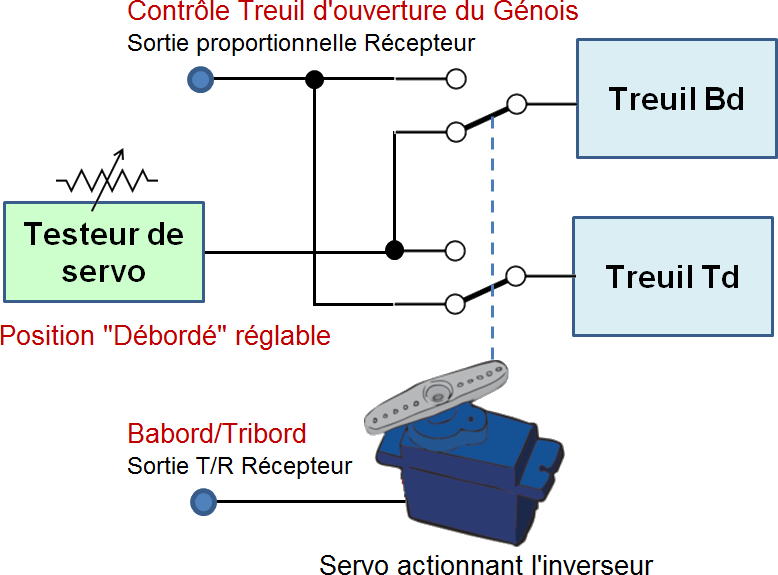
Ce schéma est d'une grande simplicité.
Un servo actionne un contacteur/inverseur qui distribue, aux deux treuils, les signaux distincts nécessaires en fonction de la position du switch de sélection de bord actionné sur l'émetteur.
Ce système peut être remplacé par un module Switch électronique à raccorder sur la sortie Baord/Tribord du récepteur.
-Le treuil de réglage d'ouverture recoit le signal proportionnel correspondant à la position du manche de l'émetteur.
-L'autre treuil de "libération/débordement" se place en position "débordé" par l'usage d'un driver/testeur de servo à ajuster, en position fins de courses, grâce à un simple petit potentiomètre, une fois pour toutes .
Un changement de position du servo commandant le débordement, induit par le basculement du switch Tout ou Rien de l'émetteur, provoque le changement de bord du génois.
Chaque treuil alterne alors de fonction : l'un devient proportionnel pour le réglage d'ouverture, l'autre se place en fin de course pour assurer le débordement.
Un tel driver/testeur de servo est facilement réalisable, sinon on en trouve divers modèles à prix démocratique sur le Web ;))

Modèle à 1 !
Le schéma de principe, à base de portes NOR-CD4001 monté en Multivibrateur astable et monostable optimisés, est le suivant:
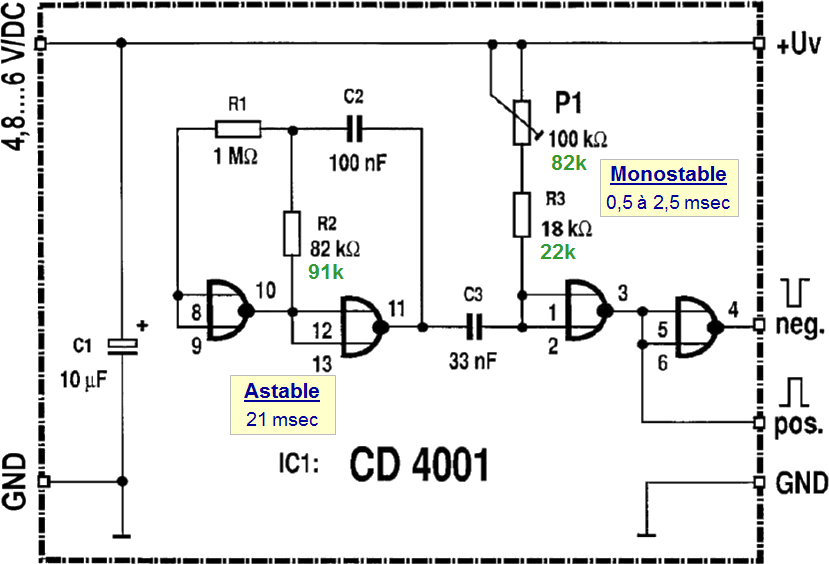
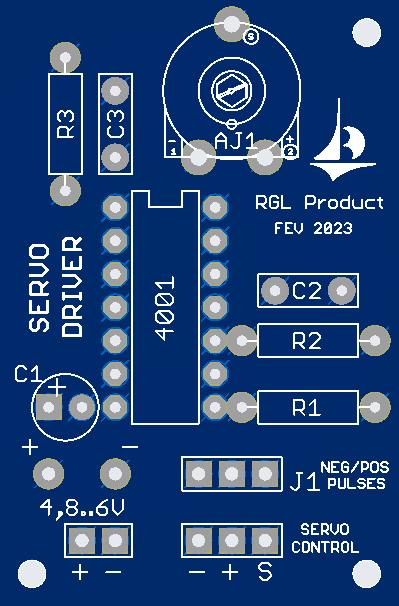
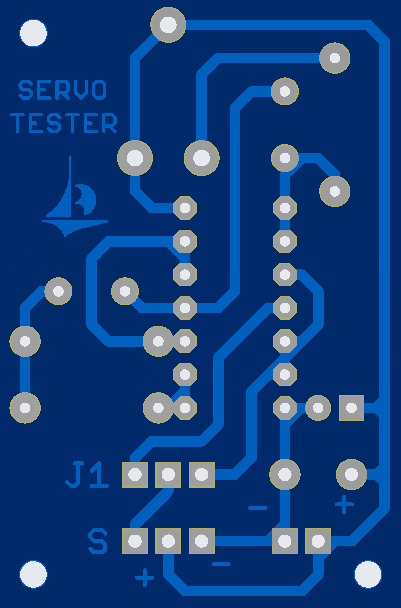
La réalisation prend finalement place sur une petite platine de 30 x 46 mm !
Si vous voulez modifier et affiner les valeurs des composants, je vous ai finalisé un petit fichier Excel à télécharger ci-après.
Calcul des impulsions du testeur de servo (Excel)

| 05 - Etude du module commercial Double Winch GM-DW |
Concept 02
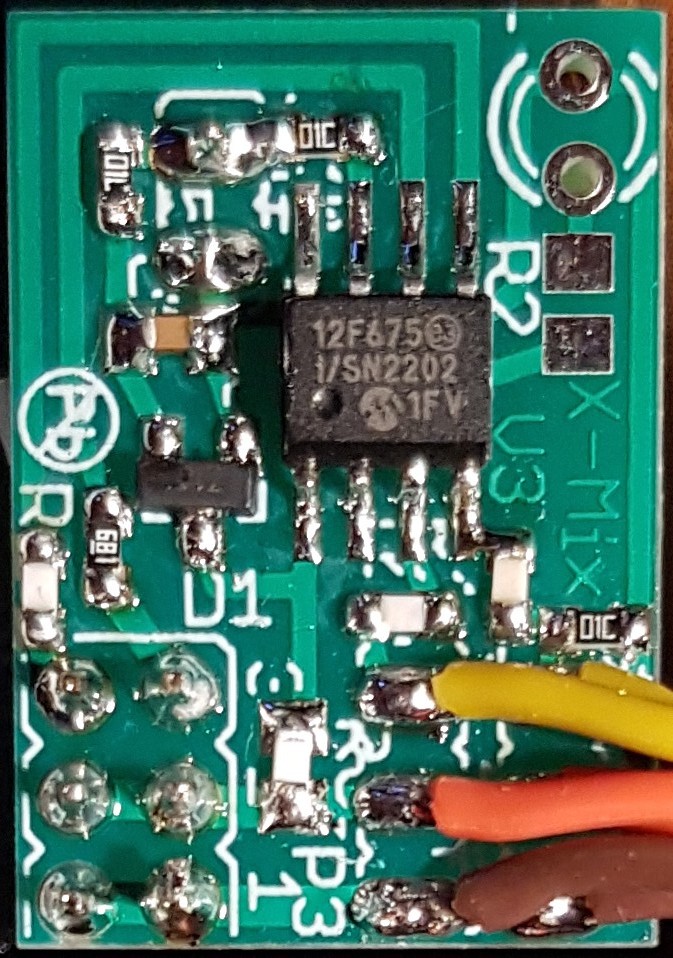
Il s'agit ici d'utiliser un petit module commercial comprenant un mini MicroContrôleur, à très faible consommation, pour commander nos deux treuils.
Il va remplacer 1)_le servo qui commandait le switch à bascule, 2)_ce switch et 3)_le module "testeur de servo" qui positionnait le treuil de débordement en fin de course.
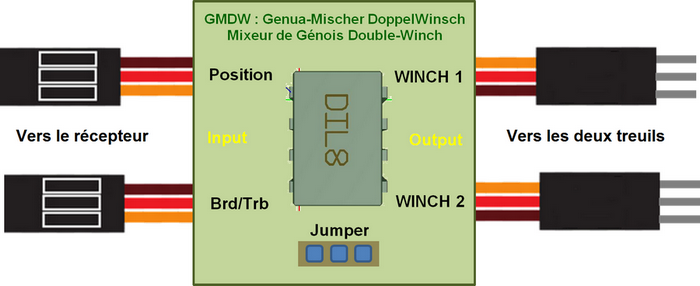
Ce module est développé et vendu en Allemagne sous le nom de GMDW (Genua-Misher Doppel Winsch / Mixer Double Winchs pour Génois)
Distribution: http://momo-sauerland.de/index.php/modellbau/spezial-losungen/
Commande (Publicité gratuite !): Mail to: info@momo-sauerland.de Ref: GM-DW
Ce module dispose de : - deux entrées à brancher au récepteur (Débordement Bd/Tb sur la voie Tout ou Rien, et voie proportionnelle dédiée au réglage du génois)
- deux sorties pour les treuils
Pour un coût de l'ordre de 22, hors frais de livraison (7), il ne pèse que quelques grammes.
Il est alimenté par la tension d'alimentation du récepteur, indépendamment de la tension de service des treuils.
Le petit microcontrôleur PIC12F675 ne supportant pas plus de 5volts, est protégé par une régulation à diode Zener de 4v7.
Le principe de fonctionnement est identique à celui du concept 01 en présentant cependant un encombrement et une consommation moindre.
Le GMDW agit suivant le bord où est basculé votre switch Tout ou Rien: il coupe le signal proportionnel du treuil actif qui se met alors automatiquement en position de repos, complètement débordé, tandis que l'autre reprend la course du manche contrôlant ainsi le bordage et l'ouverture du génois sur l'autre bord.
Le basculement du switch de l'émetteur produit l'effet inverse: le treuil qui réglait le génois, déborde et libère complètement l'écoute et conserve cette position de repos.
L'autre, qui était au repos se positionne suivant l'état du manche de commande et reprend le contrôle du génois sur le nouveau bord.
A noter enfin que ce module offre la possibilité d'utiliser, sur l'émetteur, un switch à trois positions.
Lorsque le switch est en position milieu, (signal Neutre), les deux treuils débordent totalement et libèrent entièrement les écoutes.
Ainsi, lorsque vous changer de bord, si vous marquez un léger temps d'arrêt sur cette position médiane, le circuit d'écoute se détendra durant cette période transitoire.
Enfin, un jumper de configuraton permet de régler le sens de déplacement des 2 winchs suivant la manière dont vous avez réalisé et placé vos circuits d'écoutes.
La notice explicative du GM-DW (Pdf en Anglais) se trouve ici: 
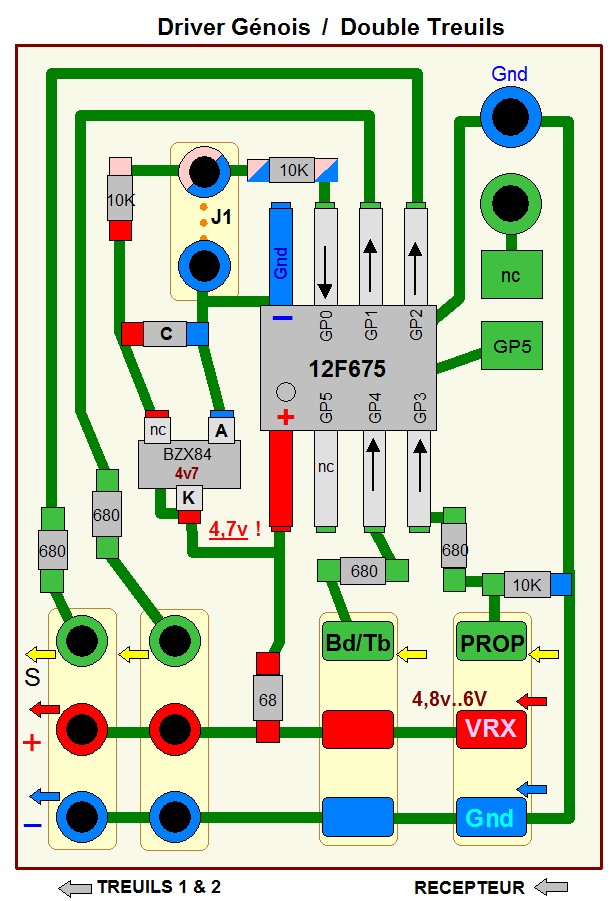
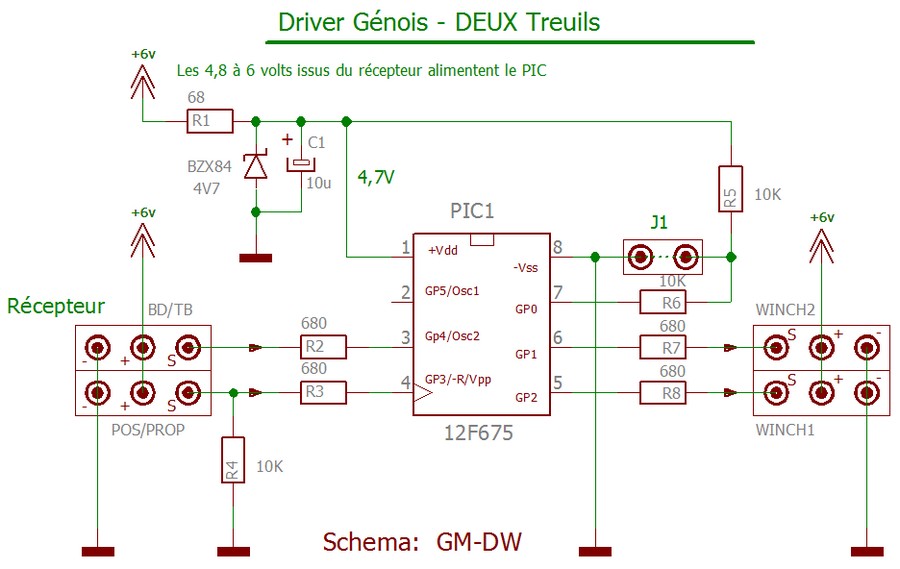
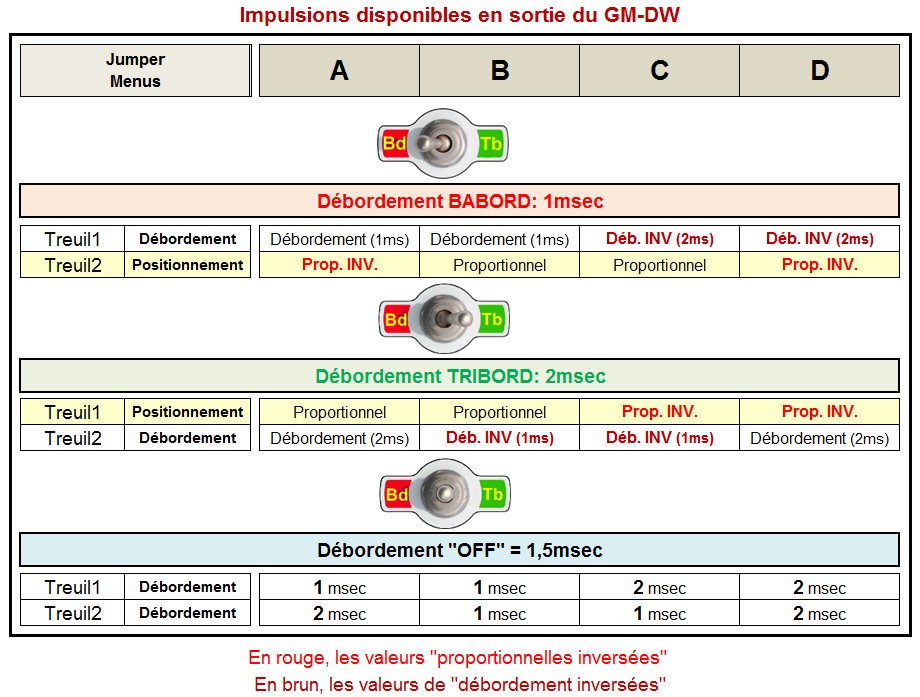
Le jumper J1 permet d'accéder à 4 configurations différentes suivant la manière dont votre circuit d'écoute aura été installé.
Cela influencera le sens de rotation des treuils suivant 4 possibilités différentes.
Il suffit de placer le jumper et ensuite de le retirer pour passer à la configuration suivante. (voir mode d'emploi - pdf ci-dessus)
La dernière configuration choisie sera finalement mise en mémoire pour les futures utilisations du bateau.
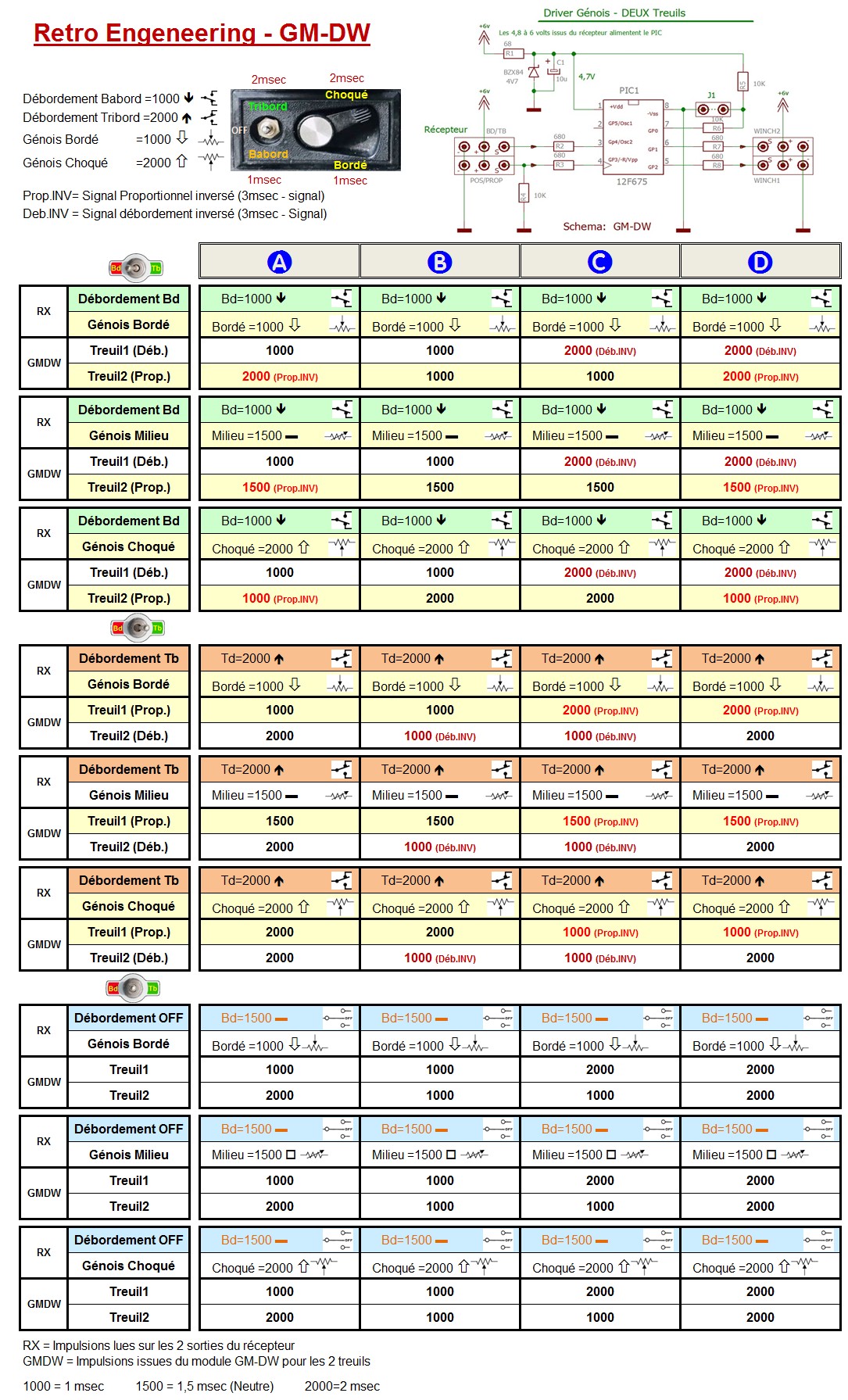
Pour mes lectures des impulsions en sortie du GM-DW, j'ai utilisé un analyseur logique en partant du postulat suivant:
- Débordement Babord: l'émetteur délivre des impulsions de 1 msec,
- Débordement Tribord: l'émetteur délivre des impulsions de 2 msec,
- Génois bordé: l'émetteur délivre des impulsions de 1 msec
- Génois choqué: l'émetteur délivre des impulsions de 2 msec
Lorsque le switch à trois positions est placé au milieu, l'émetteur délivre les impulsions de Neutre égale à 1,5 msec.
Mais dans ce cas, on voit que les treuils se positionneront dans l'une ou l'autre position extrême de fin de course. (1 ou 2 msec) !
Ils ne se trouveront donc pas inactifs ou en "roue libre" comme j'ai pu le lire par endroit !
Dans le tableau de ci-dessous, il faut comprendre que la mention "Proportionel" signifie que les impulsions générées par l'émetteur se retrouvent à l'identique sur le treuil réglant le génois.
Par contre, l'indication "Prop. INV." signifie que si l'émetteur délivre des impulsions de 1 msec, le système délivrera, à ce treuil, des impulsions de 2 msec (et 1msec/RX pour 2msec/TX).
Analyse des signaux issus du module GM-DW en vue de reproduire le programme du PIC

Visualisation des signaux de sortie du GM-DW

Une visualisation des signaux des deux sorties du module GM-DW commercial, à l'aide d'un analyseur logique, laisse apparaître des signaux bien peu conventionnels !
En effet, contrairement à une trame classique devant présenter des impulsions séparées régulièrement d'une vingtaine de millisecondes, nous voyons ici de "laides séries" disparates d'impulsions (3,6,5,1,2, ...) séparées parfois d'environ 20 msec et d'autres espacées de... 40 à 41 msec !
Tout cela n'est pas très "académique" et provient assurément d'une programmation pas complètement finalisée ou optimisée.
Voila les informations nécessaires sur ce module GM-DW vous permettant maintenant d'effectuer du retro-Engeneering pour reconstituer, ou même améliorer, le programme. ;))
Enfin, souvenez-vous que ce système vous obligera à utiliser deux manches séparés pour gérer Génois et Grand-Voile... en sus du safran !
Le débordement restant commandé par un interrupeur à bascule à 3 positions de l'émetteur.
En effet, comme nous allons le voir, coupler Grand-Voile et génois (comme cela se fait matériellement avec un foc) ne semble pas une bonne idée car, aux allures arrières, le génois ne peut pas s'ouvrir aussi largement qu'un foc.
Dans cette hypothèse, il serait alors nécessaire de placer un dispositif de réduction de course sur les servos du génois, sans impacter la course du servo de la Grand-Voile !
Ce qui reste dans le domaine du possible puisqu'il existe de tels modules de réduction de course... mais le présent module évite cet inconvénient.
Réalisation personnelle du module et du programme du GM-DW
Je me suis alors lancé le défit de reconstituer ce module commercial et ... , surtout, son programme de contrôle aboutissant au précieux fichier .Hex permettant de programmer le PIC12F675 !
J'ai utilisé une plateforme PICAXE permettant de facilement et rapidement programmer/reprogrammer ce petit microcontrôleur sans devoir le déplacer vers le module final.
Le programme a été écrit pour une fréquence d'horloge de 4Mhz, conforme à la vitesse de l'oscillateur interne du PIC12F675 de destination finale.
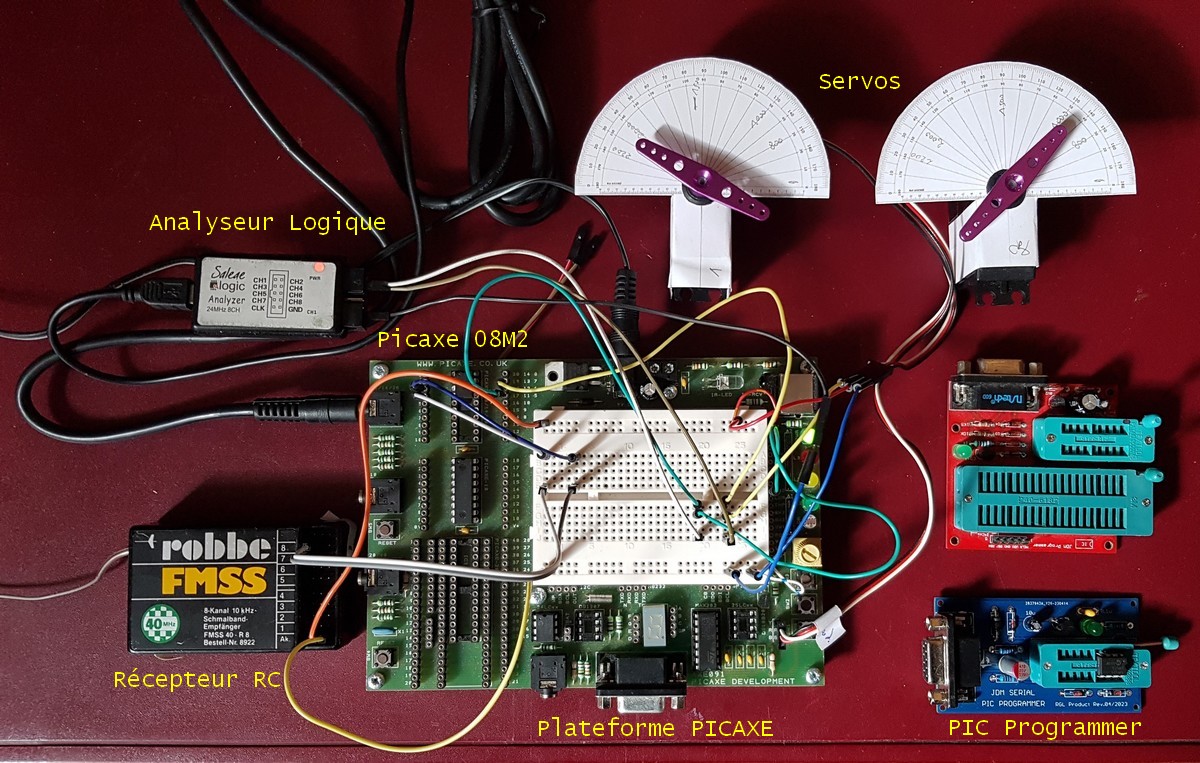
Platine d'essai et de contrôle pour simulation du système GM-DW à l'aide d'un picaxe 08M2 (PIC12F1840) afin de reconstituer le programme.
Le programme Picaxe a ensuite été adapté pour générer le fichier .Hex qui a été reprogrammé dans un PIC12F675 à l'aide du logiciel PicBasic Pro Compiler et d'une interface de programmation (JDM Programmer).
Mon programme étant finalement optimisé et placé dans un PIC12F675, j'ai terminé en analysant mes signaux de sortie avec un analyseur logique ...

Et bien, le moins qu'on puisse en dire est que ceux-ci sont assurément bien plus conformes à la "norme" de contrôle d'un servo que le module commercial original !
Notons ici que la stabilité en position d'un servo est assurée par des impulsions de valeurs identiques qui se suivent.
L'espace existant entre chacune de ces impulsions (de l'ordre de 20 à 21msec) détermine la vitesse de rafraîchissement de la position du servo mais aussi le maintien de sa résistance à l'effort !
Mon petit module a étét construit avec des composants traversants au lieu de minuscules composants CMS/SMD.
La platine n'est guère beaucoup plus grande et mesure à peine 34 x 26 mm... ce qui ne devrait pas poser beaucoup de problème dans nos grandes coques de voiliers !
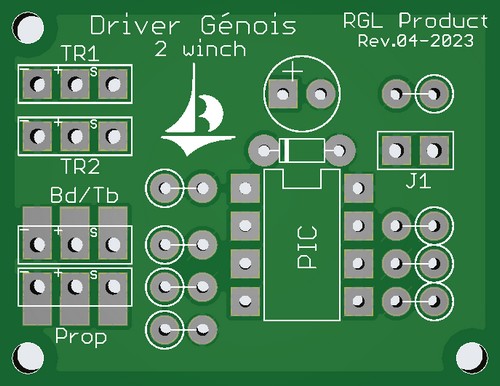

Ma réalisation personnelle du module de gestion d'un génois à deux treuils
AND... THE Programme !!! ;))
'**********************************************************************
' Programme: GM-DW_05.PBP (c)Roger LEGAT 05-2023
' Genoa Driver with 2 Winches---> PIC 12F675 @4Mhz
'***********************************************************************
' PicBasicPro Compiler V:2.40 670 Words compiled
'*** PIC Pinouts/Specifications
'------------------------------------
' PIC 12F675 (Internal 4Mhz Osc) DEFINE OSC =Default value =4
' __ __
' Vcc +| U |- Gnd
' (nc)GP5 x| |< GP0 _Config Jumper
' _Dir Direction GP4 >| |> GP1 _TR1 Winch1
' _Pos Position GP3 >| |> GP2 _TR2 Winch2
' -----
@ Device Pic12F675, intrc_osc, wdt_off, pwrt_on, mclr_off, protect_off
DEFINE OSC 4 '1= 10us Pulsin/out Unit 100 = 1ms @4Mhz
'1= 1ms Pause Unit 1 = 1ms @4Mhz
ANSEL = 0; Set Ports as Digital i/o, not analog input
ADCON0 =0; Shut OFF the A/D Converter
CMCON = 7; Shut OFF the Comparator
'Option_reg = 0 'Pullup ON
'IF R.PullUp are enabled, inputs concerned must be specified in WPU register.
'WPU = %... 1=PullUp Selected
'VRCON = 0; Shut OFF the Voltage Reference
TRISIO = %011001 ; 1=Input
GPIO = %00 ; Make all pins 0 except input pins
'*** In/Out pins ..................................................
'GND pin8 - Gnd
Input 0 : Symbol _Config = GPIO.0 'Jumper pin7 - In0
Output 1 : Symbol _TR1 = GPIO.1 'Winch1 pin6 - Out1
Output 2 : Symbol _TR2 = GPIO.2 'Winch2 pin5 - Out2
Input 3 : Symbol _Pos = GPIO.3 'Position pin4 - In3
Input 4 : Symbol _Dir = GPIO.4 'Direction pin3 - In4
; 5 : Symbol _xxx = GPIO.5 pin2 - nc
'Vcc pin1 - Vcc
'*** Variables
Menu VAR byte 'Program Mode index (0 to 3)
Pos VAR Word 'Proportional Position of Genoa
pPos VAR Word 'Previous Position
RPos VAR Word 'Reverse Position Value (3msec - Pos)
Dir VAR Word 'Tacking Direction (Port/Starboard)
pDir VAR Word 'Previous Direction
RDir VAR Word 'Reverse Direction Value (3msec - Dir)
OffSet CON 4 'Error reading PULSIN compensation 5 x10us=50us =0,5ms
'******* INCLUDE and ASSEMBLER *******************************************
OSCCAL = $38 ' $38=56d ' Also 3438 to be manually placed at 3FF Address with the IC-Prog Editor!
'Different value for each PIC !!! Be sure to read and keep/archive this before programming for the first time!
;Value that you have previously read from your blank PIC at address $3FF!
;Otherwise, after programming, this value will be lost!
;Set manualy the OSCCAL Value to 3FF Address each time you reprogram!
Asm
BSF STATUS,RP0 ; Set File Register Bank to 1
CALL 0x3FF ; Retrieve Factory Calibration Value *
MOVWF OSCCAL ; Update Register with factory CAL Value
BCF STATUS,RP0 ; Set File Register Bank to 0
Endasm
'=== MAIN PROGRAM ==============================================
Init:
READ 0, Menu 'Read Eeprom when starting (Check Mode Prg)
MainLoop: '=============================================================
IF _Config=0 Then Gosub MODE ' Enabled Mode Configuration Jumper
Pulsin _Pos,1,Pos 'Read Proportional Position of Genoa
IF ((POS <(pPos+OffSet)) AND (Pos>(pPos-OffSet))) Then Pos=pPos
Gosub Tri
Ppos = pos
Pulsin _Dir,1,Dir 'Read Tacking Direction (Port/Starboard)
IF ((Dir <(pDir+OffSet)) AND (Dir>(pDir-OffSet))) Then Dir = pDir
Gosub Tri
Pdir=Dir
Goto MainLoop
End
'=======================================================================
' --- SUBROUTINES ---
'=======================================================================
TRI:
Select Case Menu
Case 0
Gosub PRG0
Case 1
Gosub PRG1
Case 2
Gosub PRG2
Case 3
Gosub PRG3
End Select
Return
'-------------------------------------------------
MODE: 'Change and memorize the Menu Program index (0 to 3)
Menu = Menu + 1
IF Menu > 3 Then Menu = 0
WRITE 0,Menu 'Write to Eeprom @Addr.0 the menu index
Pause 1000 '1 sec
Return
'-------------------------------------------------
PRG0:
RPos = 300-Pos 'Reverse Position (3msec-Pos)
IF Dir <120 Then '1ms (<1,2ms)
Pulsout _TR1,Dir
Pulsout _TR2,RPos
Else
IF Dir < 170 Then '1,5ms (<1,7ms)
Pulsout _TR1,95 '1ms
Pulsout _TR2,216 '2ms
Else '2ms (>=1,7ms)
Pulsout _TR1,Pos
Pulsout _TR2,Dir
Endif
Endif
Return
'-------------------------------------------------
PRG1:
RDir = 300-Dir 'Reverse Direction (3msec-Dir)
IF Dir <120 Then '1ms (<1,2ms)
Pulsout _TR1,Dir
Pulsout _TR2,Pos
Else
IF Dir < 170 Then '1,5ms (<1,7ms)
Pulsout _TR1,95 '1ms
Pulsout _TR2,95 '1ms
Else '2ms (>=1,7ms)
Pulsout _TR1,Pos
Pulsout _TR2,RDir
Endif
Endif
Return
'------------ -------------------------------------
PRG2:
RPos = 300-Pos ' Reverse Position (3msec-Pos)
RDir = 300-Dir ' Reverse Direction (3msec-Dir)
IF Dir <120 Then '1ms (<1,2ms)
Pulsout _TR1,RDir
Pulsout _TR2,Pos
Else
IF Dir < 170 Then '1,5ms (<1,7ms)
Pulsout _TR1,216 '2ms
Pulsout _TR2,95 '1ms
Else '2ms (>=1,7ms)
Pulsout _TR1,RPos
Pulsout _TR2,RDir
Endif
Endif
Return
'-------------------------------------------------
PRG3:
RPos = 300-Pos ' Reverse Position (3msec-Pos)
RDir = 300-Dir ' Reverse Direction (3msec-Dir)
IF Dir <120 Then '1ms (<1,2ms)
Pulsout _TR1,RDir
Pulsout _TR2,RPos
Else
IF Dir < 170 Then '1,5ms (<1,7ms)
Pulsout _TR1,216 '2ms
Pulsout _TR2,216 '2ms
Else '2ms (>=1,7ms)
Pulsout _TR1,RPos
Pulsout _TR2,Dir
Endif
Endif
Return
'==== END OF PRG ===============================================
__
| 06 - Estimation de l'espace nécessaire dans la coque |
Bon, vous voilà donc décidé à oser le génois ... ! :))
Il va alors maintenant falloir s'assurer que votre coque pourra abriter l'installation de ce système en permettant un déplacement suffisamment long du circuit de débordement du génois.
Il y a deux longueurs à prendre en considération:
- le déplacement maximal nécessaire au débordement complet du génois
- le déplacement maximal nécessaire au réglage du génois, pour la position "entièrement choqué".
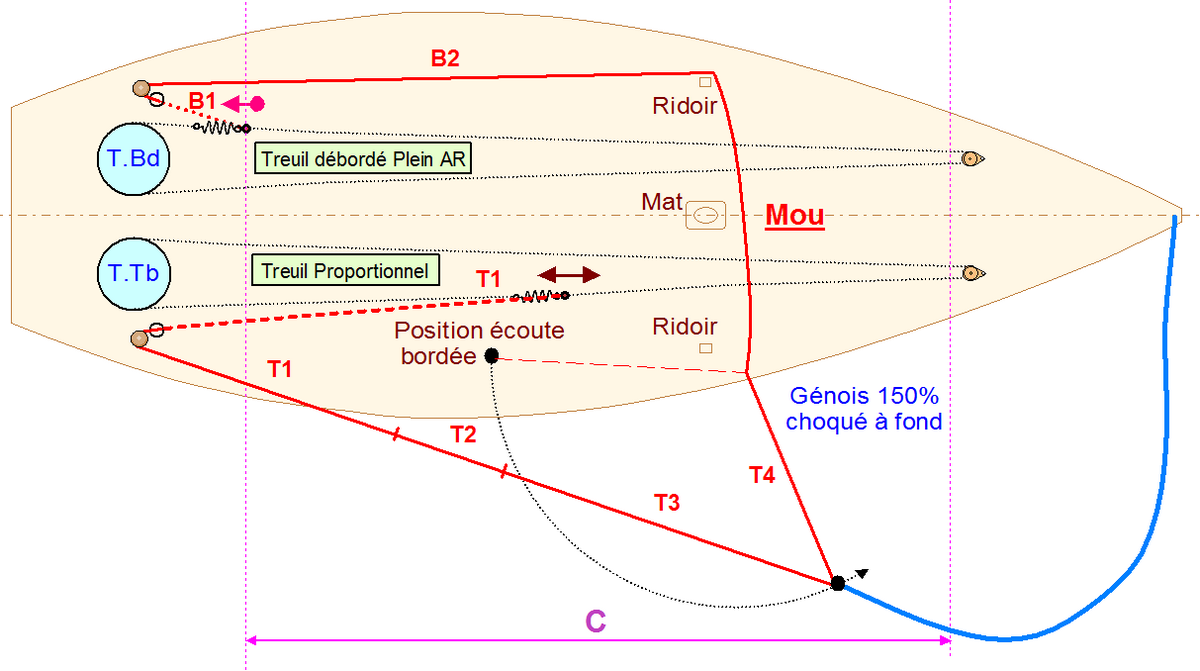
1- Déplacement nécessaire au débordement
Reprenons notre exemple avec le génois établi à Tribord et bordons-le à fond.
Son point d'écoute est donc le plus en arrière possible.
(Notez que pour alléger le schéma, le circuit fermé des treuils a été dessiné en pointillés.)
Nous allons maintenant devoir déterminer le plus long déplacement nécessaire en prenant en compte: la position des ridoirs, du mat et du point d'écoute du génois.
Ainsi, partant d'une position initiale totalement bordé à Babord pour changer de bord et finalement border à fond le génois sur Tribord, le déplacement du point d'écoute de génois aura été de (2D + Mou).
" D " est la distance comprise entre le point d'écoute, génois totalement bordé, et le ridoir ou le mat le plus en avant.
" Mou " est la grandeur comprise transversalement entre les deux ridoirs précités, en y ajoutant, si nécessaire, un rabiot permettant la souplesse du changement de bord.
Ce rabiot est à estimer sur votre modèle...
" C " est la longueur de Course permise par les treuils
Si C est plus grand que (2D+Mou), tout va bien puisque le déplacement nécessaire au débordement le plus large est assuré par la course des treuils.
Dans le cas contraire, nous verrons, plus bas, la manière de solutionner le problème par l'usage de "poulies volantes".
C doit être au moins égal à, ou plus grand que : (2D+Mou)
C >=(2D+Mou)
2- Déplacement nécessaire au réglage
Toujours dans la même configuration Tribord, nous allons maintenant choquer le génois.
Sur le schéma suivant, les éléments du circuit B1, B2 et Mou, jusqu'au ridoir Tribord, restent inchangés.
La portion T4, invariable, détermine cependant l'ouverture maximale du génois.
On se rend alors vite compte que plus on choque, plus le point d'écoute avance fortement, déformant anormalement le génois.
Pour un génois présentant un plus grand recouvrement, T4 serait plus long et permettrait "un peu plus" d'ouverture.
Avec un tel schéma, que je vous recommande d'effectuer sur les plans de votre modèle, on constate que la marge de réglage du génois n'est pas si large que ca et que son angle d'ouverture ne pourra pas être aussi grand que celui de la Grand-Voile qui, elle par vent arrière, se déborde à près de 90° de l'axe du bateau !
Raison pour laquelle il ne faut pas coupler les signaux du genois à ceux de la GV.
Rappelons d'ailleurs, encore une fois, que l'utilisation du génois n'est vraiment adaptée que pour les allures du près aux vents de travers !
Voici, sur le schéma suivant, un réglage vraiment limite avec une ouverture de génois qu'il ne faudrait pas dépasser.
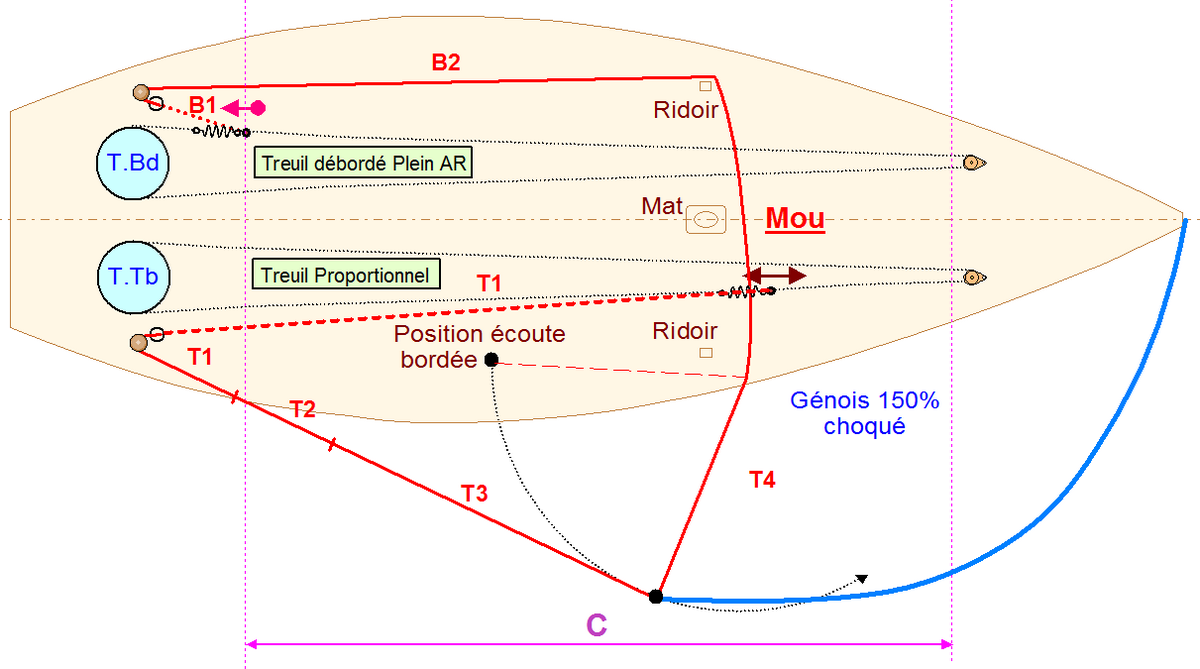
Nous constatons ainsi que, par rapport à la longueur de déplacement nécessaire pour le débordement, celle du réglage d'ouverture est largement inférieure.
Il faut donc juste vérifier la disponibilité de l'espace dans votre coque en s'assurant uniquement que C est grand assez pour effectuer le déplacement nécessaire au débordement (2D+Mou).
REMARQUE IMPORTANTE relative aux spécifications du servo treuil!
Outre la considération de l'espace disponible dans votre coque, il faudra aussi vous assurer que votre treuil est capable de dérouler la longueur d'écoute nécessaire !
Il faudra donc connaître le nombre de tours maximal que peut faire votre treuil et calculer le Diamètre du tambour à utiliser.
La longueur déroulée, PAR TOUR, est égale au Diamètre du tambour x Pi. (Pi = 3,1416).
Enfin, il faut aussi considérer que plus le Diamètre du tambour augmente, plus la Force de traction du treuil diminue !
|
Exemple de calcul du Diamètre de tambour nécessaire:
Soit 2D + Mou = 86 cm
- Pour un treuil capable d'effectuer 5 tours: soit 5x (3,1416 x D) = 86 cm
il faudra alors un tambour de D= 86/ (5x 3,1416) = 86/ 15,708 = 5,5 cm
Si le couple de votre treuil est de 10 Kg.cm, sa Force de traction se limitera alors à 10/ (5,5/ 2), soit 10/ 2,75 = 3,6 Kg !
On tient ici compte du Rayon du tambour pour calculer la force de traction restante.
- Pour un treuil capable d'effectuer 6 tours: soit 6x (3,1416 x D) = 86 cm
il faudra alors un tambour de D= 86/ (6x 3,1416) = 86/ 18,85 = 4,6 cm
Pour un treuil dont le couple vaut 10 Kg.cm, sa force de traction se limitera alors à 10/ 2,3 = 4,35 Kg
On tient compte du Rayon du tambour pour calculer la force de traction restante.
| 07 - Que faire si le circuit d'écoute de génois n'est pas suffisamment long, faute de place ou par manque de tours du treuil ? |
Avec de jolis bateaux modèles "semi-maquettes", on se trouve souvent confronté au problème d'une étrave très fine, rendant difficile l'accès et le placement des poulies fixes de renvoi, ou d'un espace libre inaccessible, voire impossible, vers l'arrière, pour y placer les treuils, à cause de la baignoire du cockpit, ...
Il n'est alors pas possible d'espacer suffisamment les treuils de leurs poulies fixes de renvoi situées à l'étrave... et la grandeur "C" n'est dès lors pas suffisante !
On se trouve aussi face au même problème avec des treuils limités en nombre de tours, ainsi incapables de délivrer la longeur de course nécessaire.
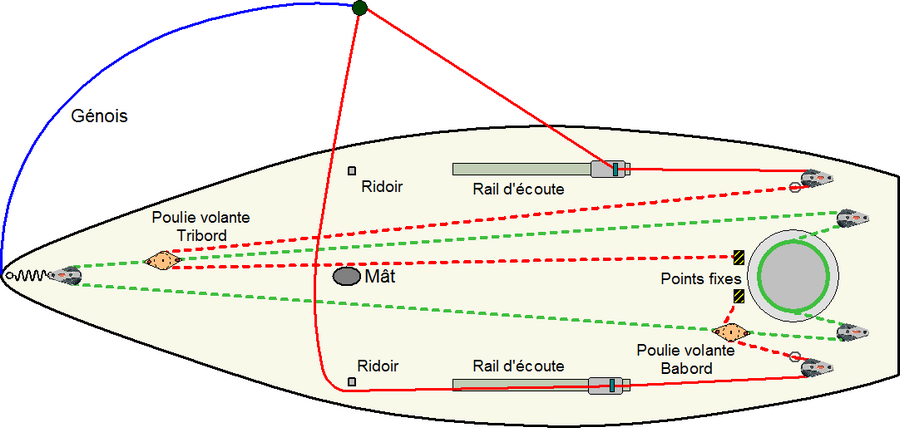
La solution va donc être de placer une "poulie volante" sur chaque circuit fermé des treuils.
Un tel simple dispositif va permettre de doubler la longueur d'écoute déroulée par les treuils.
Cependant, il sera nécessaire d'exercer une force deux fois supérieure !
Le choix de votre treuil est donc capital... (Couple et nombre de tours )
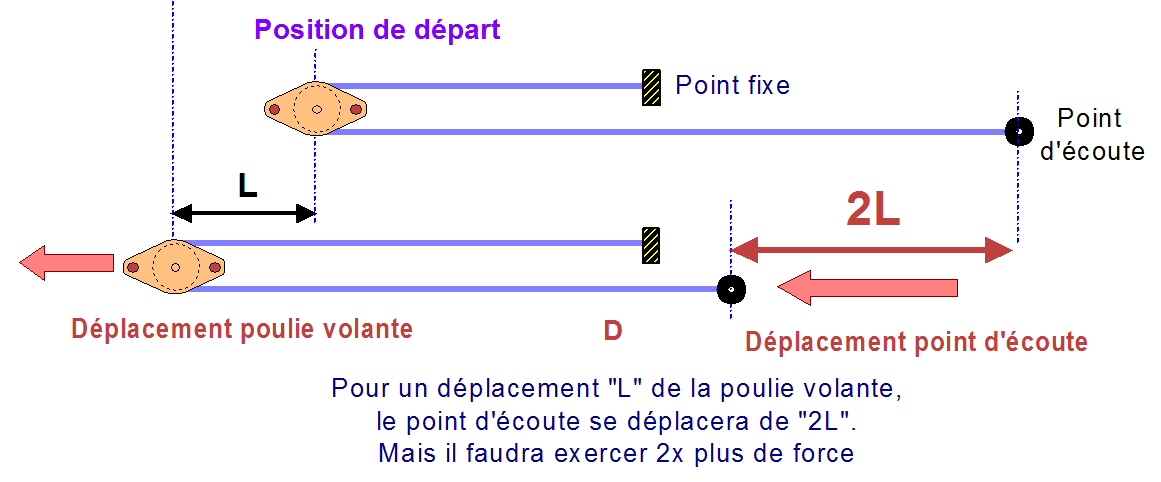
Mise en application:
Et dans ce cas, il faudra alors juste s'assurer que C soit, au moins, plus grand que (2D+Mou)/2.
On retrouve sur ce schéma les poulies fixes des deux circuits fermés des treuils et les poulies volantes de doublement de course, solidaires de ces deux circuits.
| 08 - Variante 01 UN SEUL Treuil de débordement et servo d'ouverture à bras |
Nous allons maintenant voir qu'il est aussi possible de réaliser un circuit de débordement de génois avec UN SEUL treuil.
Voici une configuration assez simple pour le contrôle du génois d'un bateau de taille modeste.
La ligne verte est la boucle de débordement qui permet de faire passer l'anneau d'écoute d'un bord à l'autre.
La ligne rouge est le contrôle de l'écoute du génois permettant de border ou choquer la voile suivant l'allure courue.
A l'étrave, un émerillon faciltera la rotation de la poulie de renvoi lors des débordements du génois.
Un anneau est fixé sur la boucle verte, permettant d'y faire coulisser l'écoute du génois.
Il est placé vers l'arrière du mat et du pont lorsque le débordement a été commandé.
Lorsque la boucle verte se déplacera sur l'autre bord, l'anneau se trouvera à la même position mais sur le bord opposé.
La ligne rouge, représentant finalemant l'écoute du génois, peut se déplacer librement au travers de l'anneau pour régler sa tension.
Celle-ci sera assuré par un servo à bras de puissance suffisante ou, au besoin, par un autre servo-treuil.
Pour nfo, Hi-Tec propose un servo à bras de forte puissance, livré avec un bras robuste de 4,5 pouces pouvant se déplacer de 140 degrés.
Il permet ainsi une course d'écoute d'une vingtaine de centimètres.
Il s'agit du modèle Hi-Tec HS-815BB Mega Sail Servo affichant un couple de 20Kg.cm sous 4,8V ou 25Kg.cm sous 6 volts !
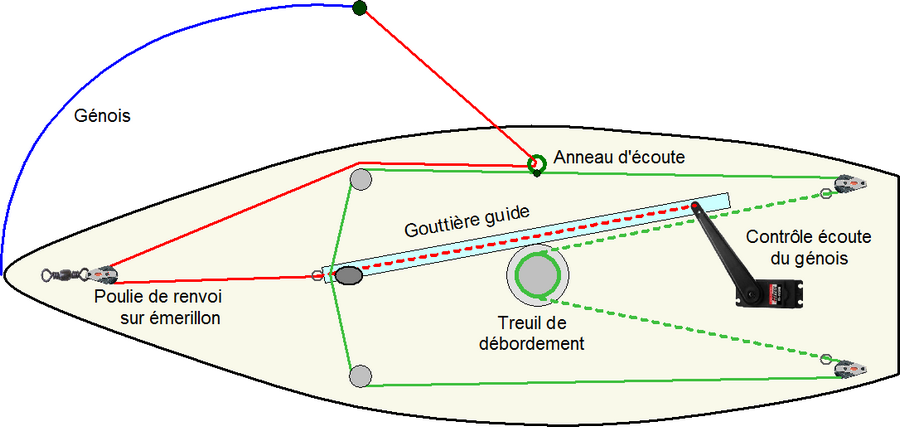
Les traits en pointillés représentent les éléments se situant dans la coque.
Les traits pleins représentent les éléments courant sur le pont.
Source: https://model-boats.com/forum/34435#91794
| 09 - Variante 02 Débordement et réglage avec un seul treuil |
Autre configuration ne nécessitant qu'un seul treuil de débordement et de réglage d'ouverture !
Le treuil devra être capable de fournir la longueur de course suffisante pour assurer le débordement et être suffisamment puissant pour assurer la manoeuvre par vent soutenu.
Pour la longeur de course utile, il sera souvent nécessaire de remplacer le tambour d'origine du treuil par un modèle de plus grand diamètre.
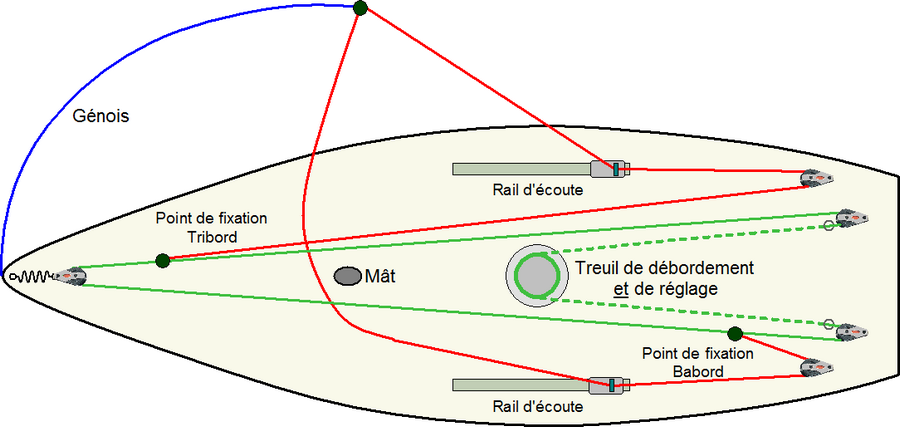
Dans cette autre variante, la boucle de débordement (en vert) est totalement logée dans la coque. Il y a donc bien moins de risque d'accrochage avec des éléments du pont.
Vous aurez constaté que les dessins de ces deux dernières variantes ne comportent pas de ridoirs.
La valeur du "mou" est donc ici nulle , réduisant d'autant la longueur nécessaire du circuit de débordement.
| 10 - Variante 03 Longueur du circuit de débordement contournant les ridoirs |
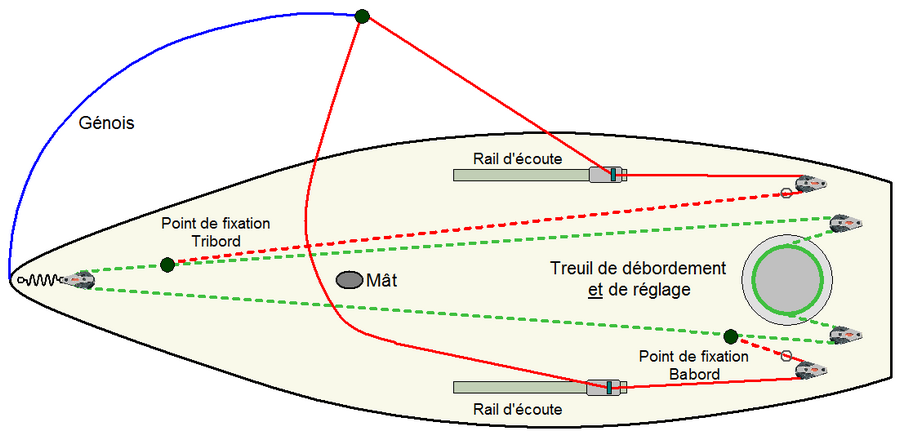
Si le bateau comporte des ridoirs, ils devront être contournés par les écoutes du génois, et on aura la configuration suivante:
Pour tous les systèmes, qu'ils soient à treuils multiples ou unique, la course nécessaire au circuit de débordement et de réglage devra valoir, au moins, 2D+Mou .
Si la coque est trop courte pour que C soit assez long, il faudra opter pour le système à poulies volantes.
| 11 - Variante 04 Un seul treuil et poulies volantes |
Grâce aux poulies volantes, l'écoute de génois parcours deux fois plus de longueur !
Mais le treuil devra fournir deux fois plus d'effort !
Il faut donc juste que C >=(2D+Mou)/2
Ici encore la Société momo-sauerland.de commercialise un petit module de gestion d'un seul treuil.
Ce dispositif ajuste la position dun génois via un seul treuil.
Mais dans ce cas, une moitié de la course du treuil de voile gère le débordement et le réglage Tribord et lautre moitié pour babord.
La notice explicative de ce module (Pdf en Anglais) se trouve ici: 
A noter que le circuit est identique au GMDW (Genua-Misher Doppel Winsch / Mixer Double Winchs pour Génois) décrit ci-dessus.
La différence se situant alors au niveau de la programmation du MicroContrôleur.
| 12 - Etude d'un module à µC pour gestion d'un seul treuil |
Nous allons analyser et tenter de reproduire ce dernier module en réalisant soit même la programmation d'un petit MicroContrôleur.
Comme à mon habitude, je vais élaborer un programme sur base d'une plateforme Picaxe pour ensuite créer un fichier HEX permettant de le placer dans un petit PIC.
 |
Pour contrôler le débordement, et le réglage du génois, nous disposerons donc de deux éléments:
1_ Une voie proportionnelle, qui générera des impulsions de 1msec à 2 msec sur la sortie du récepteur
2_ Un switch à bascule à Deux positions
Considérons que lorsque le treuil recoit des impulsions de 1msec, il est enroulé en début de sa course et que
lorsque les impusions passent à 2msec, il se déroule entièrement de l'autre côté.
Comme nous allons utiliser une demi course pour chaque bord, les impulsions de 1msec à 1,5 msec contrôleront un bord, tandis que les impulsions de 1,5 msec à 2 msec contrôleront l'autre bord.
Cependant, comme nous voulons utiliser toute la course du stick de l'émetteur (qui génerera des impulsions de 1 à 2 msec) pour contrôler chaque bord, il va falloir effectuer un petit traitement des impulsions issues du récepteur avec un petit MCU.
Nous allons détailler ce calcul ci-dessous... |
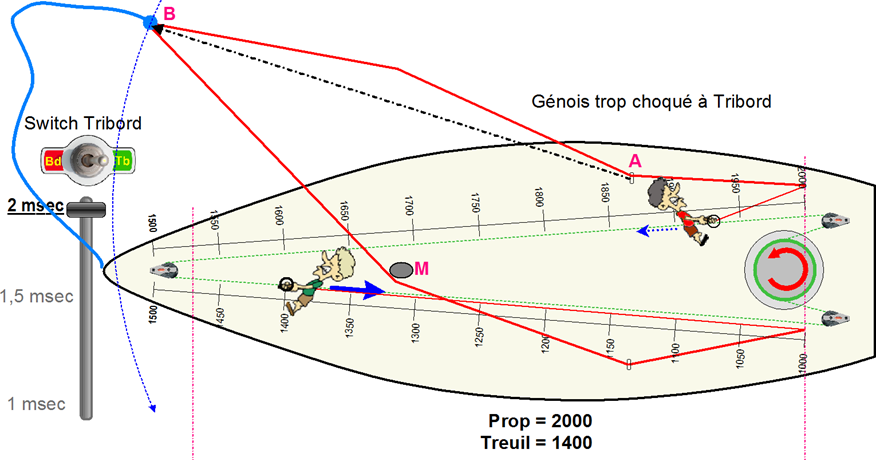
Regardons d'abord la configuration de notre circuit d'écoute et la position du treuil lorsque le génois est bordé totalement d'un côté ou de l'autre.
Quel que soit le débordement (à Babord ou à Tribord) pour border le génois, le stick sera ramené vers le bas et délivrera des impulsions de 1msec (1000µsec).
Le bord sera choisi par sélection effectuée avec le switch à bascule.
Le petit sportif en vert représente l'effort exercé par le treuil.
Celui en rouge représente l'effort exercé sur l'écoute du génois.
Dans le cas où le circuit d'écoute ne comporte pas de poulie volante, ces efforts sont identiques pour chacun d'eux.
1. Génois bordé
Dans le cas de figure que nous considérons dans cet exposé, le stick ramené vers le bas (position bordé) délivre toujours des impulsions de 1 msec (1000µsec), quel que soit le bord sélectionné par le switch.
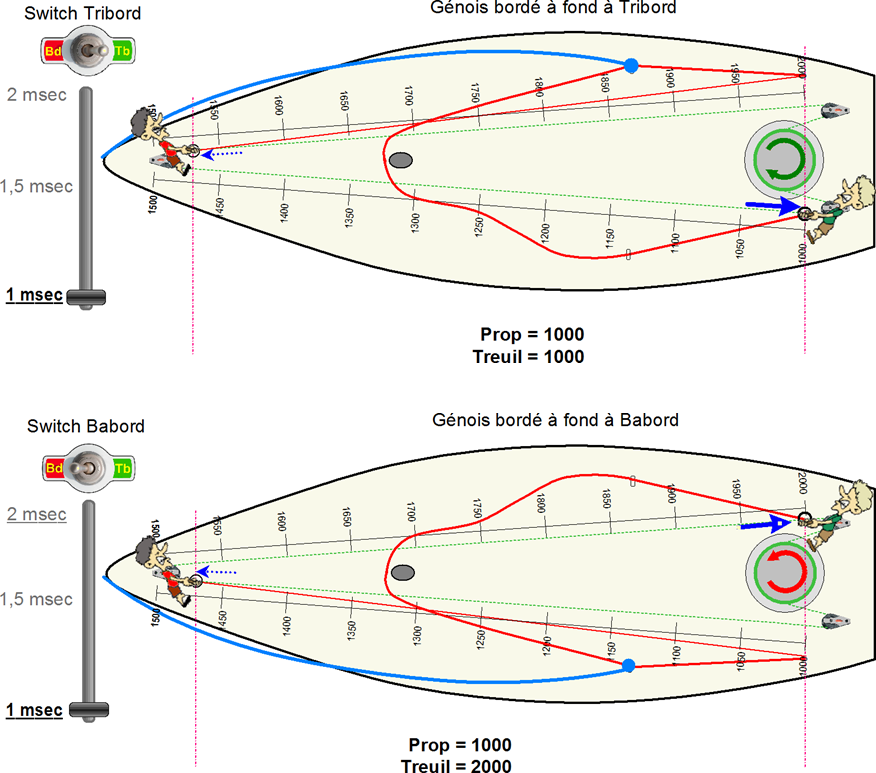
Pour un bordage tribord, on voit sur le schéma de ci-dessus, que le treuil devra recevoir des impulsions de 1000µsec.
Le treuil embarque alors la partie gauche du circuit d'écoute
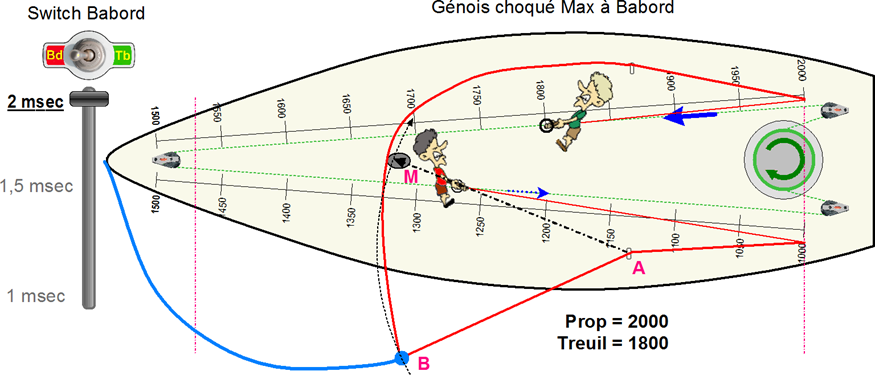
Par contre, pour un bordage complet à babord le treuil devra embarquer la boucle du circuit d'écoute vers la droite et donc recevoir des impulsions de 2000µsec !
C'est ici qu'un petit traitement mathématique s'imposera.
Nous allons voir cela plus bas.
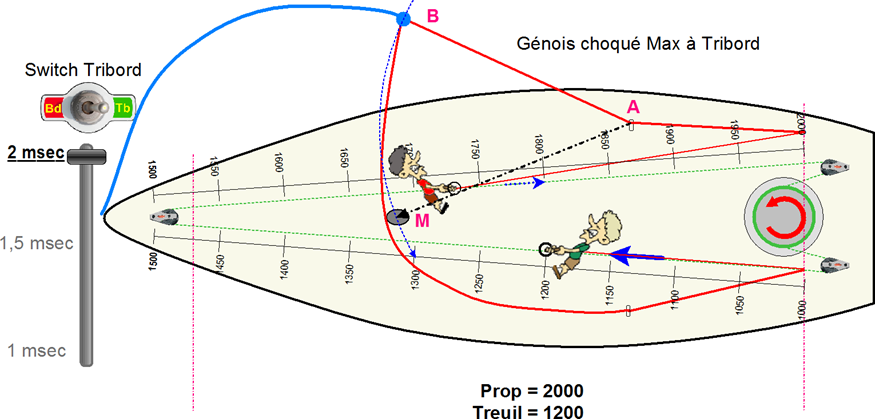
2. Génois choqué
Voyons maintenant la position du treuil lorsque le génois sera débordé sur un bord ou l'autre.
Dans ce cas de figure, le stick de l'émetteur sera poussé vers le haut (position choqué) pour générer des impulsions de 2 msec (2000µsec).
Il nous faut d'abord définir quelle est la longeur maximale nécessaire au réglage d'ouverture du génois.
En effet, il faut éviter, si celui-ci est trop choqué, que le génois puisse passer sur l'autre bord en suite d'une rafale de vent survenant subitement sur le bord opposé.
En regardant le schéma de ci-dessous, pour éviter un débordement non désiré sur le bord opposé, il suffit que la longeur d'écoute choquée (A-B) ne soit pas supérieure à la distance A-M.
Distance A-B <= AM
D'une manière générale, nous verrons que, sans poulies volantes, la longueur A-B disponible est de l'ordre de 20% de la course totale du treuil.
Ce pourcentage peut toutefois varier en fonction de l'emplacement du mat et de la disposition du circuit d'écoutes.
Pour notre exemple, nous arrivons alors aux positions suivantes pour un génois choqué au maximum, sans risquer un débordement intempestif vers le bord opposé.
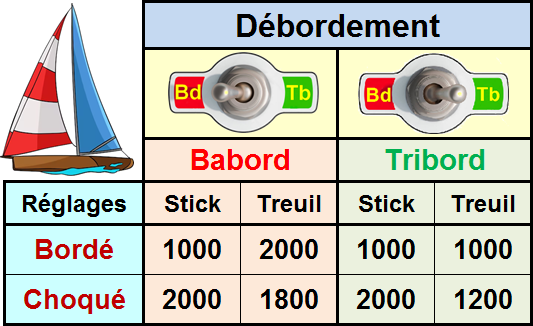
Nous pouvons donc résumer les valeurs d'impulsions nécessaires au treuil par ce petit tableau:
Les calculs à effectuer par notre petit MCU seront directement déduits de l'équation d'une droite passant par deux points !
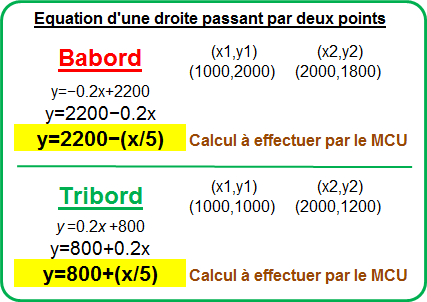
(Calculateur en ligne: https://fr.planetcalc.com/8110/ )
Tableau des résultats calculés
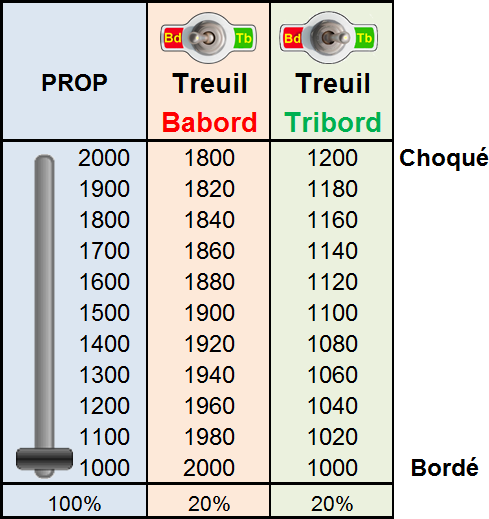
REMARQUE:
On remarque ici les limites imposées par la gestion du circuit d'écoutes du génois par UN SEUL treuil !
En effet, pour régler l'ouverture du génois, une fois celui-ci débordé du côté désiré, on ne disposera que de 20% de la course totale du treuil !
Ainsi, pour un treuil de 6 tours, avec un tambour de 5 cm de diamètre, capable de dérouler 6x (3,14 x 5)= 94cm, on ne disposera que de 19cm !
Cette longueur pourra être doublée si on place et utilise des poulies volantes dans le circuit d'écoutes.
3. Ecriture du Programme
A TESTER...
' Gestion Genois.bas
'************************
' Controle Genois avec UN SEUL Treuil.
' Rg LEGAT Rev.: 01MAR2023
'*** PICAXEPinouts ***************************************************
'
#Picaxe08M2
' __ __
' Vcc +| U |- Gnd
' |Rx Tx|
' DIRX C.4>|<> <>|
' PROP C.3>|> <>|>C.2 TRL1
' -----
SetFreqm32
'----------------------------------------------------------
'*** In/Out pins ..................................................
Symbol TRL1 = C.2 'Output Treuil1
Symbol PROP = C.3 'Input Controle Ouverture proportionnelle
Symbol DIRX = C.4 'Input Direction Debordement
'*** DIR pins ..................................................
OUTPUT C.2
INPUT C.3
INPUT C.4
'*** Variables ....................................................
Symbol OP =W0
Symbol _DIR =w1
Symbol _POS =W2
Symbol _PULSE =W3
Symbol NEUTRE =w4
'*** Constants ....................................................
NEUTRE =1200' 1,5 msec @32Mhz
' **** PROGRAMME **************************************************
DO
Pulsin DIRX,1,_DIR 'Lecture Direction
Pulsin PROP,1,_POS 'Lecture Position
OP = _POS/5 'OPeration intermediaire pour le calcul du MCU
'Select Direction and Position
IF _DIR<= NEUTRE THEN ' Babord
_PULSE = 2200-OP ' 2200-(_POS/5)
Pulsout TRL1,_PULSE
Else' Tribord
_PULSE = 800+OP '800+(_POS/5)
Pulsout TRL1,_PULSE
Endif
LOOP
End
'================================================================
| 13 - Sortie d'écoute de génois |
ll vous reste maintenant à prévoir les deux sorties d'écoutes du génois à l'arrière du pont de votre bateau.
Voici un petit dispostif réalisé avec un roulement à billes rainuré.
La cage sera réalisée en PVC ou en CTP aviation multi-couches.
Il pourra aussi être réalisé en impression 3D après modélisation de la pièce.
Les sociétés professionnelles (JLCPCB, ...) réalisent une telle pièce pour environ +1 /Pièce + frais d'envoi et taxes, soit 11,04 pour 10 pièces ... tout compris !
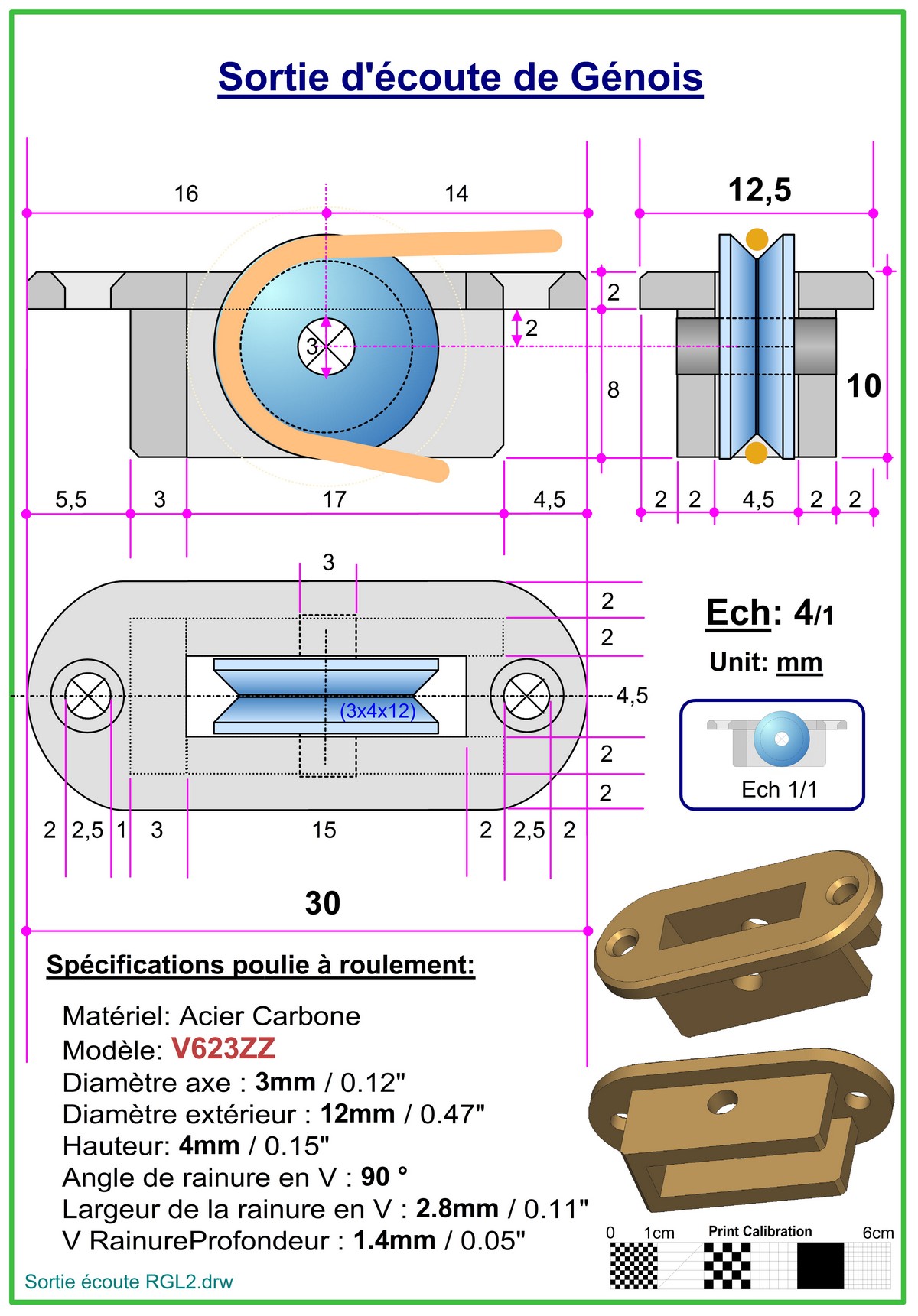


Mon plan, utlisant une poulie 3x12x4 est inspiré du modèle commercial PG, plus petit, suivant:
Pierre Gonnet me précisait les spécifications de son modèle:
- Diamètre du réa = 5 mm (?!)
- Longueur de la caisse sous pont = 13 mm
- Longueur de la patte sur pont = 25 mm
- Prix:14 /P + frais d'envoi

Pour son voilier SMARAGD, Robbe propose une autre solution utilisant un simple réa de 20x2 mm, dépourvu de roulement:
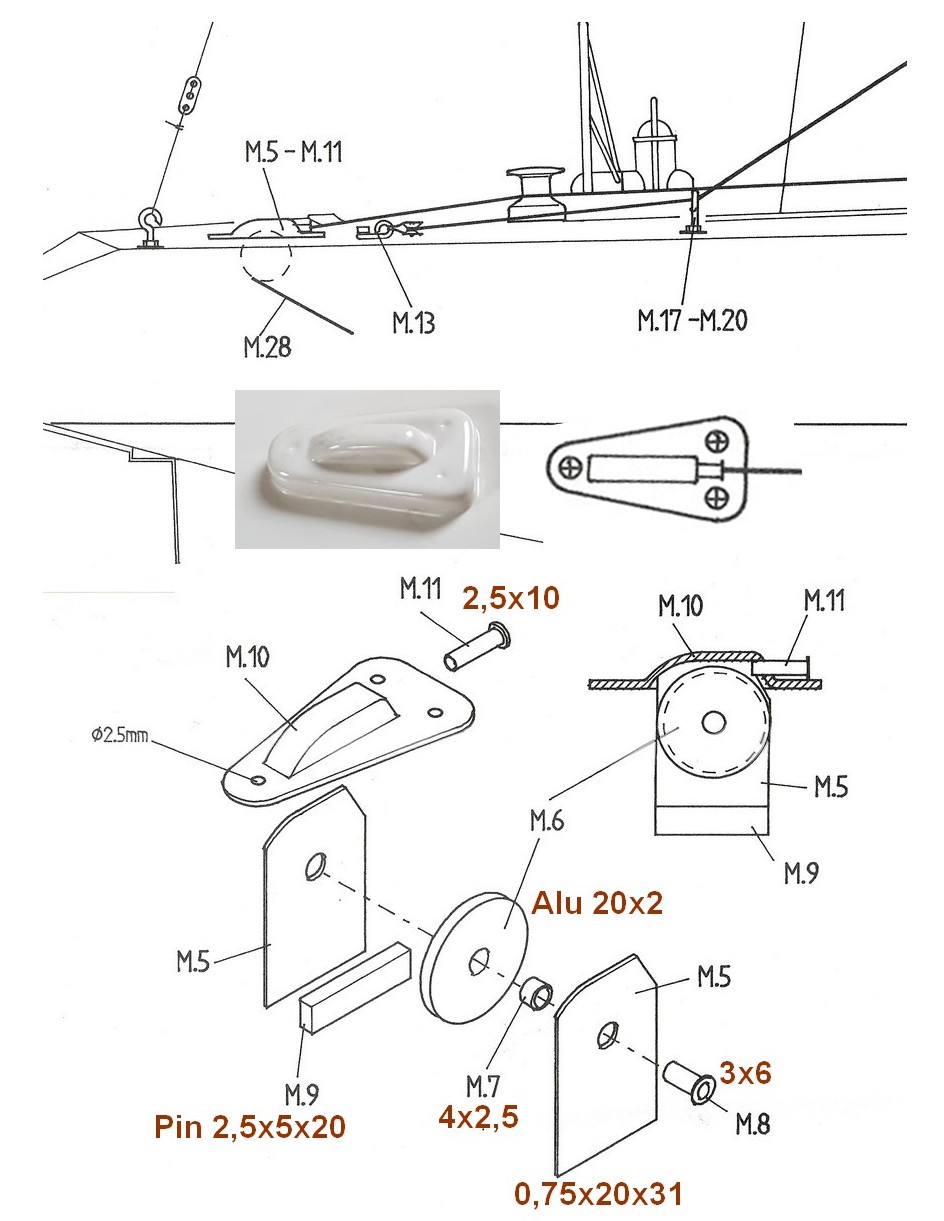
Enfin, on peut également utiliser un tube coudé mais les frottements induits sont à prendre en considération !

| 14 - Quelques vidéos d'aménagements |
https://www.youtube.com/watch?v=hdjCJAayY2k
https://www.youtube.com/watch?v=4hM2Htmgtwo
https://www.youtube.com/watch?v=UtlaIHy1sFs
https://www.youtube.com/watch?v=Aku1oebfIz8
https://www.youtube.com/watch?v=Xsnv-UdZrL4
Bon Vent ...
N'hésitez pas à me transmettre les photos de vos réalisations-installations de génois ...


Thèmes développés:
- Génois radiocommandé
- Module Genua-Misher Doppel Winsch / Mixer Double Winchs pour Génois
- Débordeur de génois RC
Trafic Visiteurs: 
Version imprimable de la page Page: Génois.htm